
,
Силу оценивают по движению, которое она вызывает или стремится вызвать в рассматриваемой системе координат, которую мы условились считать неподвижной (инерциальной).
а) Потенциальные силы – силы, которые могут быть выражены через некоторую скалярную функцию от положения точки, называемой потенциальной энергией.
Работа
на конечном перещении точки из положения ![]() в
положение
в
положение ![]() равна определенному интегралу
равна определенному интегралу
 ,
,
т.е. не зависит от формы траектории, является только функцией начального и конечного положения.
б)
Гироскопические силы ![]() - линейно зависят от
скорости точки и всегда направлены перпендикулярно этой скорости, работа
гироскопических сил, очевидно, равна нулю (примеры – сила инерции Кориолиса,
магнитная часть силы Лоренца).
- линейно зависят от
скорости точки и всегда направлены перпендикулярно этой скорости, работа
гироскопических сил, очевидно, равна нулю (примеры – сила инерции Кориолиса,
магнитная часть силы Лоренца).
в)
Диссипативные силы ![]() - направлены всегда
противоположно скорости тела относительно среды, вызывающей торможение.
- направлены всегда
противоположно скорости тела относительно среды, вызывающей торможение.
![]() ,
,
где k– положительная скалярная функция, которая может зависеть от положения и скорости тела. Очевидно, что A(Fd) < 0 – работа диссипативных сил (сил сопротивления) отрицательна.
Вся динамика построена на предположении о том, что в природе существуют инерциальные системы отсчета (ИСО) (неподвижные или движущиеся равномерно и прямолинейно).
Законы Ньютона
1. Каждое тело пребывает в состоянии покоя или равномерного прямолинейного движения до тех пор, пока действующие на тело силы не заставят его изменить движение (причиной изменения движения является сила).
2. Ускорение пропорционально
приложенной силе и направлено по прямой, по которой действует сила:  (количественная мера действия силы)
(количественная мера действия силы)
3. Силы взаимодействия двух
материальных точек равны по величине и противоположны по направлению  (сила всегда имеет материальный источник,
который испытывает обратное действие объекта, к которому приложена сила)
(сила всегда имеет материальный источник,
который испытывает обратное действие объекта, к которому приложена сила)
Динамика является наукой об ускоряющих силах и о тех движениях, которые эти ускоряющие силы могут вызвать.
Из второго закона Ньютона следует

Сила
 может быть функцией
может быть функцией  . Эти три дифференциальных уравнения 2го
порядка имеют общее решение, зависящее от шести произвольных постоянных,
определяемых из начальных условий.
. Эти три дифференциальных уравнения 2го
порядка имеют общее решение, зависящее от шести произвольных постоянных,
определяемых из начальных условий.
Аксиома о суперпозиции сил.
При одновременном действии на материальную точку нескольких сил ускорение точки относительно ИСО от действия каждой отдельной силы не зависит от наличия других приложенных к точке сил и полное ускорение равно векторной сумме ускорений от действия отдельных сил.
Между силами нет взаимного влияния друг на друга в создании ускорения точки:
 ;
;
 ;
;
 ;
;
Все это справедливо для небольших скоростей.
Размерностью силы является в системе СИ ньютон ([F]=н). Сила в 1н равна силе, сообщающей телу массой 1 кг ускорение, равное 1 м/с2.
![]() - равнодействующая,
- равнодействующая, 
Декартова
система координат: 
Естественная
система координат: ![]()
Второе уравнение можно
преобразовать: 
Получаем для естественной системы
координат: 
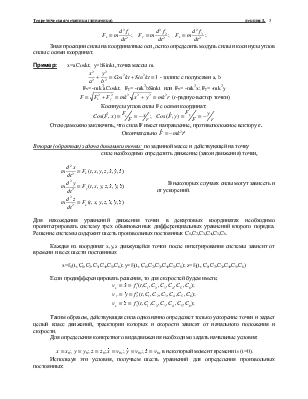
Первая (прямая) задача динамики точки: зная массу точки и ее закон движения, можно
найти действующую на точку силу.


Зная проекции силы на координатные оси, легко определить модуль силы и косинусы углов силы с осями координат.
Пример: x=aCoskt; y=bSinkt, точка массы m.
 - эллипс с полуосями a, b
- эллипс с полуосями a, b
Fx= -mk2aCoskt; Fy= -mk2bSinkt или Fx= -mk2x; Fy= -mk2y
![]() (r-радиус-вектор точки)
(r-радиус-вектор точки)
Косинусы углов силы F с осями координат:

Отсюда можно заключить, что сила F имеет направление, противоположное вектору r.
Окончательно ![]()
Вторая (обратная) задача динамики точки: по заданной массе и действующей на точку
силе необходимо определить движение (закон движения) точки,
|
|
В некоторых случаях силы могут зависеть и от ускорений. |
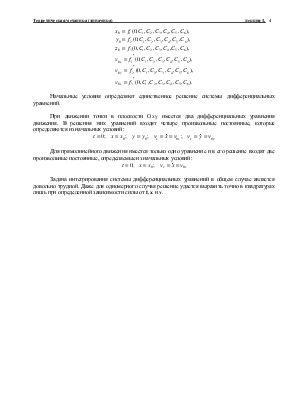
Для нахождения уравнений движения точки в декартовых координатах необходимо проинтегрировать систему трех обыкновенных дифференциальных уравнений второго порядка. Решение системы содержит шесть произвольных постоянных С1,C2,C3,C4,C5,C6.
Каждая из координат x,y,z движущейся точки после интегрирования системы зависит от времени и всех шести постоянных
x=f1(t, С1,C2,C3,C4,C5,C6); y=f2(t, С1,C2,C3,C4,C5,C6); z=f3(t, С1,C2,C3,C4,C5,C6)
Если продифференцировать решения, то для скоростей будем иметь:
Таким образом, действующая сила однозначно определяет только ускорение точки и задает целый класс движений, траектории которых и скорости зависят от начального положения и скорости.
Для определения конкретного вида движения необходимо задать начальные условия:
![]() в некоторый момент времени t0 (t=0).
в некоторый момент времени t0 (t=0).
Используя эти условия, получаем шесть уравнений для определения произвольных постоянных:
Начальные условия определяют единственное решение системы дифференциальных уравнений.
При движении точки в плоскости Oxy имеется два дифференциальных уравнения движения. В решения этих уравнений входят четыре произвольные постоянные, которые определяются из начальных условий:
![]()
Для прямолинейного движения имеется только одно уравнение и в его решение входят две произвольные постоянные, определяемые из начальных условий:
![]()
Задача интегрирования системы дифференциальных уравнений в общем случае является довольно трудной. Даже для одномерного случая решение удается выразить точно в квадратурах лишь при определенной зависимости силы от t, x и v.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.