П-регулирование вызывает некоторую ошибку
текущего значения по отношению к уставке. Это возможно из-за разницы между
теплоемкостью объекта управления и теплоемкостью нагревателя. Эта ошибка
называется смещением.
Оно может быть как
положительным, так и отрицательным (рисунок 2.8).
Зона настройки относительного диапазона Р
составляет 0 – 200% (меню 2, параметр «Р1»). Время пропорционального цикла Т
можно изменять в диапазоне от 0 до 150 сек. (меню 2, параметр «CYT1»).
Заводское значение CYT1=10сек.
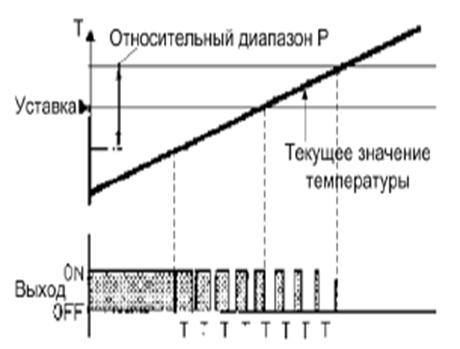
Рисунок 2.6.-
Принцип работы выхода ТК в режиме П-регулятора
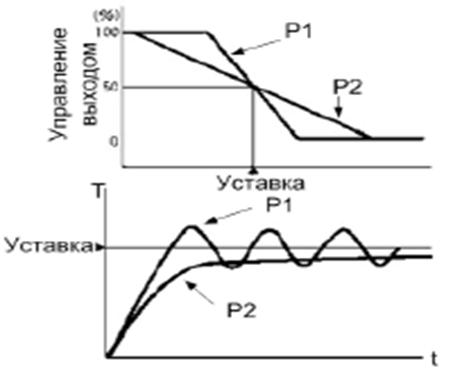
Рисунок 2.7 - Временные
диаграммы работы выхода ТК и переходные процессы изменения температуры в режиме
П-регулятора (Р2>Р1)
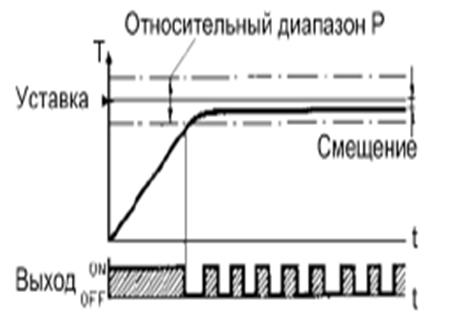
Рисунок 2.8 -
Смещение в режиме П-регулятора
Режим
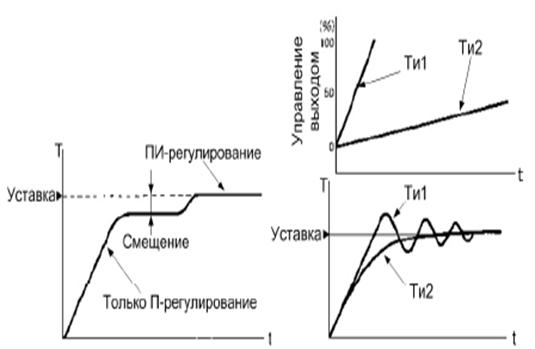
ПИ-регулятора. При
работе управляющего выхода в данном режиме дополнительно к пропорциональной
составляющей необходимо настроить постоянную времени интегрирования ТИ.
Интегрирующая составляющая вводится для компенсации смещения, возникающего при
работе П-регулятора (рисунок 2.9).
На рисунке 2.10
приведены динамические характеристики ПИ-регулятора при различных значениях
времени ТИ, поясняющие принцип работы ПИ-регулятора.
Постоянная
времени ТИ может изменяться в диапазоне 0 – 3600 сек. Его настройка
производится в меню 2 в параметре «I1».