5. Примеры производственного применения критериев эффективности
5.1 Прогноз эффективности технологического процесса абсорбции
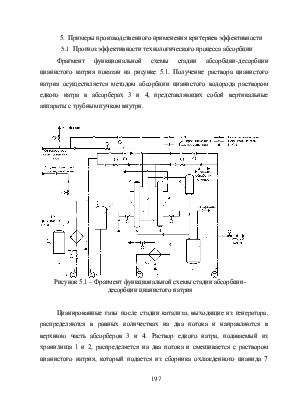
Фрагмент функциональной схемы стадии абсорбции-десорбции цианистого натрия показан на рисунке 5.1. Получение раствора цианистого натрия осуществляется методом абсорбции цианистого водорода раствором едкого натра в абсорберах 3 и 4, представляющих собой вертикальные аппараты с трубным пучком внутри.
|
|
|
Рисунок 5.1 – Фрагмент функциональной схемы стадии абсорбции-десорбции цианистого натрия |
Цианированные газы после стадии катализа, выходящие из генератора, распределяются в равных количествах на два потока и направляются в верхнюю часть абсорберов 3 и 4. Раствор едкого натра, подаваемый из хранилища 1 и 2, распределяется на два потока и смешивается с раствором цианистого натрия, который подается из сборника охлажденного цианида 7 представляющего собой вертикальную цилиндрическую емкость. В верхней части абсорберов 3 и 4 на каждой подводящей трубке установлены тефлоновые эжекторы, с помощью которых происходит эффективное смешение растворов едкого натра и цианистого натрия с цианированными газами. Далее реакционная смесь тонким слоем стекает по внутренней поверхности трубок абсорберов. В результате реакции, протекающей в пленочном слое, происходит получение водного раствора цианистого натрия. Его раствор, выходящий из абсорберов 3 и 4, во избежание разложения цианистого натрия подвергается резкому охлаждению. Для этого через гидравлические затворы раствор поступает в циркуляционный контур, где смешивается с поступающим после холодильника 5 охлажденным раствором цианистого натрия. Холодильник 5 представляет собой горизонтальный спиральный теплообменник, охлаждаемый водой. Полученный охлажденный раствор цианистого натрия самотеком поступает в сборник 7. На линиях выхода раствора цианистого натрия из абсорберов расположены пробоотборники для отбора раствора на анализ. Текущий показатель массовой доли свободного едкого натра в растворе цианистого натрия на выходе из абсорберов 3, 4 контролируется с помощью автоматических анализаторов. Не абсорбировавшиеся газы из абсорберов 3 и 4 поступают в циклон 6, где происходит отделение жидкой фазы от газообразной, при этом жидкая фаза стекает в сборник 7, а остаточные газы направляются на стадию обработки отходов.
Анализ
систем автоматического управления процессами абсорбции, а также метрологических
характеристик технических средств автоматизации, применяемых в системах
автоматического управления технологическими процессами, показал, что наиболее
эффективно процессом управлять по степени насыщения абсорбента [4, 31]. Способ
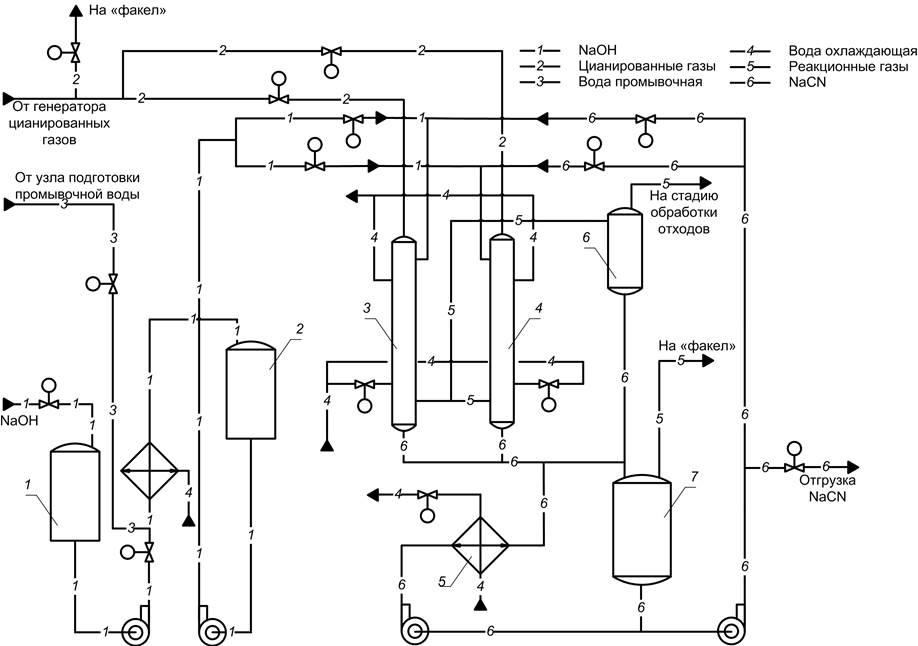
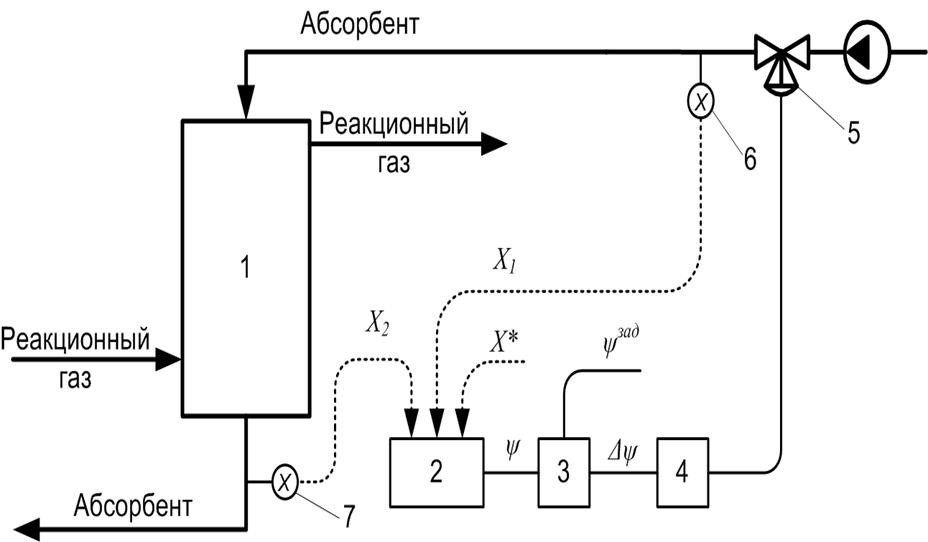
управления заключается в следующем (см. рис. 5.2) . Виртуальный прибор (блоки 2,
3, 4 на рисунке 5.2), по показаниям плотномеров, X1(t), X2(t) вычисляет текущее значение степени насыщения абсорбента,
![]() и формирует задание,
и формирует задание, ![]() регулятору (блок 4) на изменение расхода
абсорбента на абсорбер исполнительным механизмом 5.
регулятору (блок 4) на изменение расхода
абсорбента на абсорбер исполнительным механизмом 5.
|
|
|
Рисунок 5.2 - Принципиальная схема реализации способа управления процессами абсорбции [31] |
На рис. 5.2 показана схема реализации системы управления процессом абсорбции по степени насыщения абсорбента. Здесь 1 – абсорбер; 2 – система для измерения степени насыщения абсорбента; 3 – сумматор; 4 – регулятор; 5 - регулирующий клапан; 6 и 7 – датчики концентраций вещества в абсорбенте.
Для управления процессом абсорбции целесообразно использовать критерий качества протекания процесса – это степень насыщения абсорбента:
|
|
(5.1) |
где X1(t) - концентрация абсорбируемого вещества в абсорбенте на входе в абсорбер; X2(t) - концентрация абсорбируемого вещества в абсорбенте на выходе из абсорбера; X2* – значение равновесной концентрации абсорбируемого вещества в абсорбенте, получаемое по эталонной математической модели.
Априорно известно, что этот критерий имеет экстремум, дрейфующий в пространстве управляющих координат. Текущее положение экстремума рассчитать невозможно, так как дрейф критерия управления является нестационарным случайным процессом и, как правило, характеристики этого случайного процесса неизвестны. Однако можно количественно, с помощью метода наименьших квадратов, получить статистическую оценку знака и величины градиента. По знаку градиента можно принимать решение о направлении изменения управляющих координат при случайных перемещениях статической характеристики в пространстве управляющих координат. Составляющие вектора градиента могут являться рекомендациями по изменению управляющих воздействий в данной безмодельной робастной системе и, позволяют следить за перемещениями статической характеристики (5.1) в пространстве управляющих координат. Для определения текущих значений таких критериев управления всегда требуется компенсация динамических характеристик объекта управления, а иногда и динамических свойств канала измерения. Это необходимо для приведения входных и выходных переменных текущего состояния объекта управления к одному моменту времени измерения. Полевой изменяемый прибор [30] для этой цели реализует уравнение измерения, которое содержит динамические характеристики объекта управления в знаменателе, и динамические характеристики измерительного прибора в числителе [31]:

Здесь С1(iTS), C2(iTS)- соответственно, последовательности показаний плотномеров на входе и выходе абсорбера, Q(iTS) – последовательность показаний прибора для измерения расхода тощего абсорбента, h11 (jT) – последовательность весовых коэффициентов импульсной характеристика чувствительного элемента плотномера, h21(jTS) – последовательность весовых коэффициентов импульсной характеристики абсорбера по каналу управления, К1, К2 – настроечные коэффициент плотномеров, К3 – настроечный коэффициент эталонной модели объекта управления, Cmax – равновесная концентрация.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




 ,
,