1.2. Оптимизация настройки интеллектуальных приборов и систем
Робастная система управления - это самонастраивающаяся система адаптивного управления динамической системой с неточно известной (или вообще неизвестной) математической моделью объекта управления, работающая в условиях случайных нестационарных возмущений и случайных стационарных помех измерения [40, 41, 42, 43, 44]. В робастных системах текущая идентификация динамических характеристик объекта управления, проводится виртуальным прибором с целью определения положения рабочей точки на критерии управления, текущая идентификация статических характеристик объекта управления для целей адаптации эталонной модели. При этом должна обеспечиваться устойчивость всех переходных процессов. Периодическая адаптация (настройка) всех алгоритмов управления, обеспечивающих движение к оптимальному положению рабочей точки, предназначена для обеспечения максимальной эффективности функционирования объекта управления. Естественно, что задача синтеза алгоритмов адаптации должна рассматривается как периодически нестационарная. Неопределенность объекта управления обычно связывают с неточностью задания эталонной модели объекта управления. Причем эта неопределённость связывается как с параметрическими неточностями, так и со структурными неточностями. Так же и виртуальный прибор должен быть способен управлять непрерывным объектом в условиях внешнего стохастического воздействия, то есть в условиях неполного, нечеткого и неточного знания характеристик объекта управления и характеристик окружающей среды, в которой функционирует этот объект. При этом, все виды погрешностей измерения всех приборов участвующих в определении текущего положения рабочей точки технологического процесса, сосредоточены в показаниях виртуального прибора для измерения критерия управления (часть информационной подсистемы АСУТП). По этому и все потери могут быть определены (см. рис. 1.5) по показаниям этого виртуального прибора, Z(iTS), которые могут быть получены на ранних стадиях проектирования методом имитационного моделирования и применением супервизорного управления, как основным способом реализации управляющих воздействий в условиях неопределённости и наличия алгоритмов визуализации текущего положения рабочей точки. Из анализа количественных оценок эффективности алгоритмов слежения за перемещениями рабочей точки технической системы на критерии управления видно, что главным параметром, подлежащим компенсации в процессе адаптивного управления, являются скорость дрейфа критерия управления. Именно она определяет требования к алгоритмам идентификации и к длине измеряемых реализаций виртуального прибора. Уровень помехи можно считать константой, так как основная борьба с ней должна возлагаться на информационную подсистему АСУ ТП. В этом и заключается синергетический подход к оценке качества алгоритмов управления, когда все ресурсы системы управления (вычислительные возможности, интеллектуальные возможности, технические возможности и др.) направлены на достижение одной цели – обеспечения минимума потерь конкретного ресурса (или энергии), фиксируемого критерием управления, Y(t) (см. рисунок 1.4).
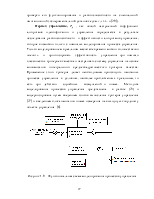
Из рисунка 1.6 видно, что эффективность функционирования технической системы, ЭР(iTS), достигает максимального значения при обеспечении минимума потерь информации. Этот минимум достигается компромиссом между потерями от остаточного дрейфа, Gу1(iTS), которые зависят, в основном, от скорости дрейфа характеристик объекта управления, и потерями от неточности идентификации, Gу3(iTS), которые зависят в основном от объема выборки, то есть от длины массива, N0 . Эта оптимизационная задача может быть решена только методом имитационного моделирования процессов управления [23]. Имея в наличии уравнение измерения критерия управления (фактически эталонная модель объекта управления) можно провести имитацию работы виртуального прибора, проверить адекватность измерительного процесса, а, главное, провести поиск оптимальных параметров функционирования всех измерительных каналов управляющей системы и множества алгоритмов управления. При этом основным критерием качества информационно-измерительной системы виртуального прибора должна быть методическая динамическая погрешность измерения (определения) критерия качества управления, так как именно от неё зависит качество показаний виртуального прибора, Z(iTS) и, как следствие, величина потерь от неточности косвенного измерения критерия управления, Gу2(iTS).
Таким образом, методическая динамическая составляющая погрешности должна быть выражена как функция параметров информационно-измерительной системы, измерительных каналов и измерительной информации. Важной особенностью математической модели динамической погрешности обработки информации является ее зависимость от трех интервалов дискретизации – это времени измерения, периода опроса датчиков и периода управления. Время измерения, Тс, как настроечный коэффициент модулей сбора информации. Период опроса датчиков, Тs , как настроечный коэффициент информационно-измерительной системы в целом. Период управления, Ту , как общий настроечный коэффициент алгоритмов идентификации и управления. Период управления характеризует погрешности идентификации математических моделей, участвующих в выработке управляющего воздействия, и определяет время измерения критерия управления. Эта погрешность относится к методической составляющей систематической погрешности обработки информации в информационно-измерительной и управляющей системе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.