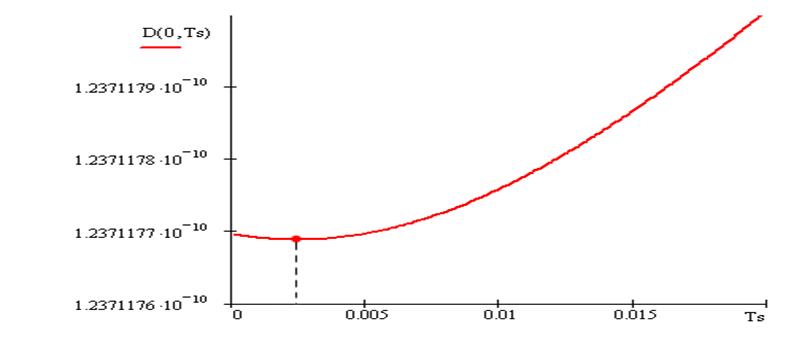
Рис. 4.12 Дисперсия абсолютной погрешности измерения 8-разрядным АЦП
Исследования, проведенные на примере моделирования метрологических характеристик программно-аппаратного измерительного канала, структура которого состоит из последовательного соединения первичного преобразователя (датчика информации), нормирующего преобразователя, модуля УСО МВА (АЦП), программного фильтра и модуля УСО МВВА (ЦАП) [12] изображены на рисунках 4.13 -:- 4.15. На рисунке 4.13 представлены зависимости погрешности имитационного моделирования процесса измерения от периода опроса датчиков, t0. Моделирование проводилось при постоянных значениях скорости изменения сигнала, α=0.001 гц длины массива N=50 и постоянной времени эталонного прибора, TP=0.05 сек [12]. Менялись уровень помехи, S (см. рис. 4.13а) и постоянная времени программного фильтра, Tf(см. рис. 4.13б). Анализ этих зависимостей показывает, что не существует оптимального значения периода дискретизации. Уже при t0 = 1 секунде ошибки перестают зависеть от процессов дискретизации и зависят от параметров измерительного канала и обрабатываемого сигнала, то есть от динамических свойств датчика, TP от уровня помех, S, и скорости изменения моделируемого параметра α.
 |
На рисунке 4.15а представлены зависимости динамической погрешности моделирования процессов управления от постоянной времени программно-аппаратного динамического преобразователя, Tf . Зависимости получены при различных скоростях изменения сигнала, α, и массивов различной длины, N. Из рисунка 4.15 видно, что все зависимости имеют минимальное значение при одном и том же оптимальном значении Tf. Это подтверждает сделанный ранее вывод о том, что методическая динамическая погрешность моделирования зависит не столько от скважности решетчатой функции программного динамического преобразования, t0, сколько от длины массива весовых коэффициентов программно-аппаратного динамического преобразователя N. А, главное, что существуют оптимальные режимы обработки измерительной информации при имитационном моделировании случайных процессов.
Рисунок 4.15б подтверждает влияние периода дискретизации, t0, на величину динамической погрешности процесса измерения. Увеличение периода дискретизации приводит к смещению оптимального значения постоянной времени программного динамического преобразователя, Tf , в область более больших ошибок.
Анализ рисунка 4.15в показал, что при изменении свойств эталонного динамического преобразователя, TP , необходимо корректировать и постоянную времени программного динамического преобразователя, Tf. Причём, чем точнее проведена идентификация постоянной времени программного динамического преобразования, тем меньше величина погрешности имитационного моделирования процесса управления. Здесь [12], при моделировании использовались следующие исходные данные: скорость изменения сигнала, α=0.01, длина массива весовых коэффициентов программного динамического преобразователя N=50, динамические свойства эталонного динамического преобразователя TP=5 секунд.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.