Оптимизация настроек всей системы полностью определяются метрологическими характеристиками идентификатора. В работе [27] исследованы метрологические характеристики такого идентификатора методом имитационного моделирования по моделям из работы [64].
Результаты моделирования процессов измерения и процессов формирования относительной методической динамической погрешности обработки измерительной информации показывают, что методическая динамическая погрешность обработки измерительной информации имеет экстремальный вид, при определении весовой функции эндогазогенератора по каналу расход газа – влажность эндогаза. При этом минимум этой метрологической характеристики приходится на ноль по обоим параметрам объекта управления (см. рисунок 5.14). Поэтому результаты моделирования, представленные на рисунке 5.14 дают нам количественную оценку точности попадания в оптимум при управлении по градиентным алгоритмам управления.
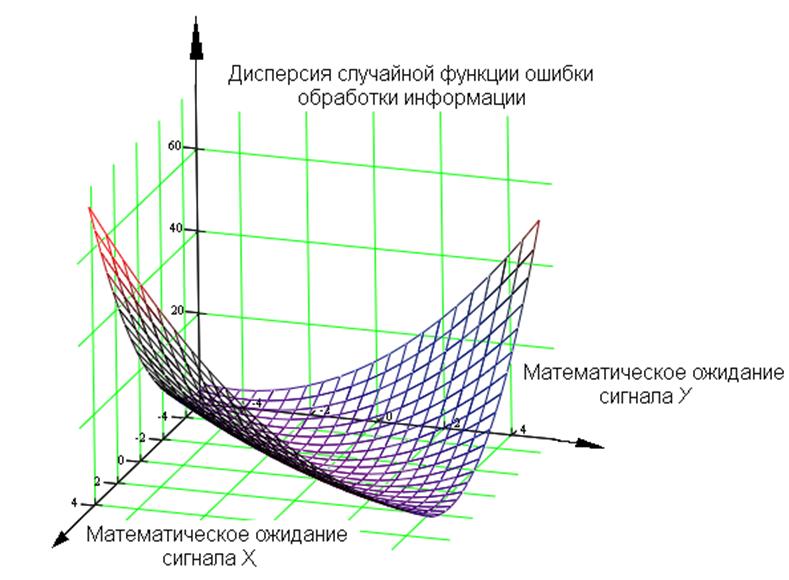
Рисунок 5.14. Поле ошибок идентификации в точке линеаризации
На рисунке 5.15 представлены зависимости ошибки идентификации от периода опроса датчиков, TSУ , которая получена по математическим моделям из [64]. Зависимость позволяет выбрать оптимальный темп обработки информации в идентификаторе динамических характеристик эндогазогенератора равным 10 секундам (TS =10).
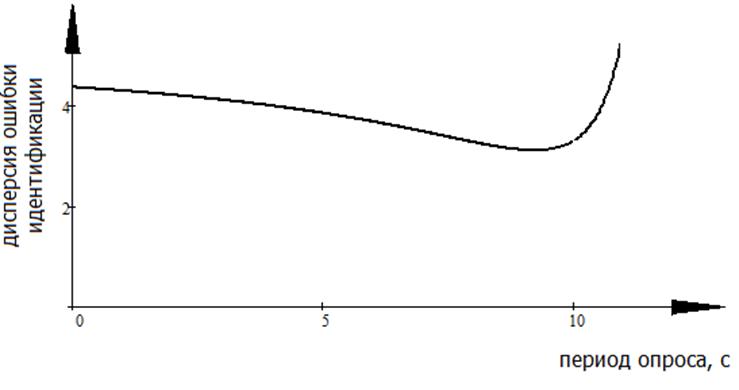
Рис. 5.15 Зависимость ошибки идентификации от периода опроса датчиков
Потери эффективности при робастной стабилизации и выбор оптимальных настроек идентификатора можно провести, согласно [27, 59], путем имитационного моделирования выделив ошибки адаптивного управлении при робастной стабилизации влажности эндогаза, как:
E(t) = Y(t) – Z(t)= -
-  ,
,
где Y(t) - это показания эталонной системы регулирования влажности эндогаза, а Z(t) - показания системы робастной стабилизации влажности эндогаза.
На рисунке 5.16 представлены результаты имитационного моделирования этих потерь в робастной системе адаптивного управления эндогазогенератором.
Анализ результатов
моделирования показывает, что в области малых значений Ts наблюдается плато с погрешностью
отработки информации на уровне сотых долей процента. Увеличение периода опроса
датчиков, Ts , приводит к снижению погрешностей
обработки информации. Это сказываются фильтрующие свойства объекта управления и
наличие обратных связей в объекте управления. Поэтому при проектировании адаптивных
систем управления период нанесения управляющих воздействий, ТУ
, должен выбираться с учетом динамических свойств объекта управления: ![]() где N – длина массива динамической характеристики объекта
управления.
где N – длина массива динамической характеристики объекта
управления.
Таким образом, основным параметром робастной технической системы следует считать период нанесения управляющего воздействия, ТУ, который связывает все характеристики технической системы в одну робастную систему. При формировании текущих значений методической динамической погрешности переходных процессов в робастной системе формируются и текущие значения потерь, как основного критерия качества всей робастной системы, включая алгоритмы идентификации и алгоритмы визуализации.
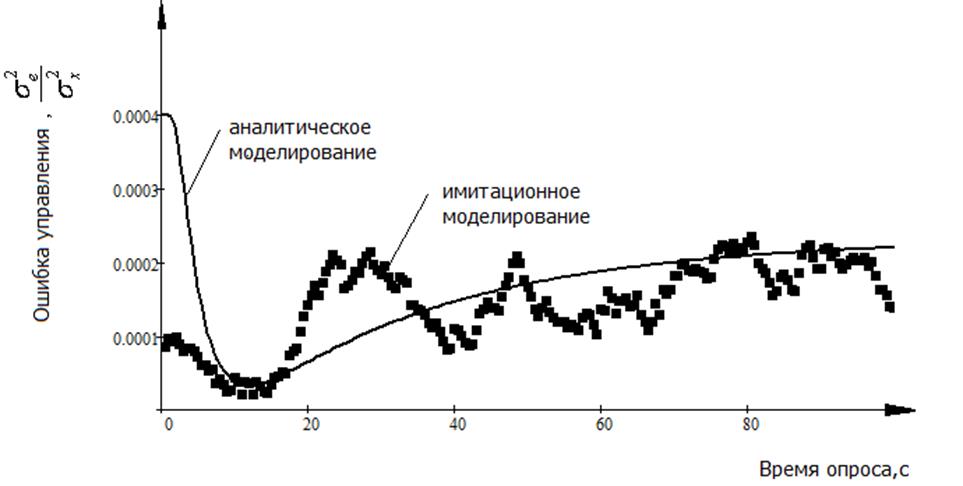
Рис. 5.16 Ошибки робастной стабилизации влажности эндогаза
Анализ результатов имитационного моделирования, представленных на рисунке 5.16 показывает, что существуют оптимальные условия обработки цифровой информации в робастной системе и эти оптимальные условия определяются общим темпом обработки измерительной информации в системе, TSопт. Данный период опроса датчиков является, одновременно, настроечным коэффициентом идентификатора и единым периодом опроса датчиков в информационно-измерительной подсистеме. При этом, оптимальные настройки любого программного идентификатора динамических характеристик объекта управления гарантируют прогноз минимальных потерь, образующихся при робастной стабилизации параметров технической системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.