Рис. 5. Залежність ентропійного критерію (3.2.2) від точнісних характеристик (М=2)
Як видно з рис. 5, функція критерію є взаємно-неоднозначною. Тобто вона приймає два максимуми, перший у випадку, коли D1 та D2 приймають значення 1, а другий, коли D1 та D2 приймають значення 0. В першому випадкові максимум достовірностей свідчить про те, що отримано безпомилковий за навчальною матрицею контейнер(всі реалізації свого класу потрапили в контейнер, жодна реалізація чужого класу не потрапила в поточний контейнер)-тобто в такому випадкові контейнер має максимум інформації по відношенню до класа-сусіда, у другому ж випадкові, нульові значення першої та другої достовірності свідчать про те, що контейнер поточного класу взагалі не відрізняється від класа-сусіда.
Отже перший випадок - це критерій максимальної різноманітності.
Другий випадок-критерій максимальної схожості.
Оскільки нам необхідно знайти максимум різноманітності, то
ми розбиваємо навпіл область визначення функції інформаційного критерію. Будемо
шукати максимум Е в області для ![]() , котру
ми будемо називати робочою областю визначення інформаційного критерію.
, котру
ми будемо називати робочою областю визначення інформаційного критерію.
Тоді, врахувавши всі особливості, отримаємо такий алгоритм розрахунку оптимальних радіусів:
1. Обрати поточний клас.
2.Для кожного класу перебирається радіус від 1 до певного
заданого числа(в загальному випадкові-до ![]() -
кількості ознак).
-
кількості ознак).
3.При і-тому значенні радіусу будується контейнер. Розраховуються точні сні характеристики.
4. Точнісні характеристики підставляються в функцію
![]()
5.Серед значень Е, котрі знаходяться в робочій області
(тобто при тих значеннях радіусу, для котрого ![]() )
обирається максимальне. Воно відповідає певному радіусу. Отже, контейнер з
таким радіусом відповідає принципу максимальної різноманітності.
)
обирається максимальне. Воно відповідає певному радіусу. Отже, контейнер з
таким радіусом відповідає принципу максимальної різноманітності.
Процес створення системи прийняття рішення складається з двох етапів-навчання та екзамен.
Навчання-це процес створення досвіду, в той час як екзамен - реалізація визначення належності поточного стану до того чи іншого класу розпізнавання.
Належність реалізації до того чи іншого контейнеру означає те, що параметри поточного стану об’єкта є найбільш схожими з типовими характеристиками перебування об’єкта в певному стані.
Належність поточної реалізації визначається за допомогою функції належності-виразу, що чисельно інтерпретує ступінь належності екзаменаційної реалізації до того чи іншого контейнера.
Прикладом функції належності може бути вираз:
Тут ![]() значення функції
належності до m-того класу розпізнавання(стану об’єкту),
значення функції
належності до m-того класу розпізнавання(стану об’єкту),
В чисельнику виразу знаходиться кодова відстань від екзаменаційної реалізації до еталонного вектора m-того класу, в знаменнику-оптимальний радіус контейнера m- того класу.
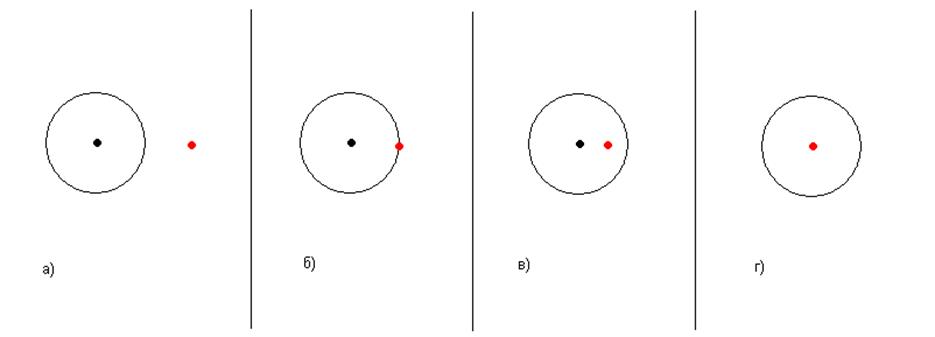
В результаті можна отримати наступні значення функції належності в залежності від позиції реалізації( На рисунку 6 зображено характерні ситуації положення реалізації відносно контейнера. Реалізація позначена червоним кольором, а контейнер - чорним )
1) Реалізація знаходиться поза контейнером(Рис 6.а)-тоді ![]() <0.
<0.
2) Реалізація знаходиться на межі контейнера(Рис 6.б)-тоді ![]() =0.
=0.
3) Реалізація знаходиться в контейнері (Рис 6.в)-тоді ![]() .
.
4) Реалізація знаходиться в центрі контейнера (Рис 6.г)-тоді ![]() <1.
<1.
Алгоритм визначення належності поточної екзаменаційної реалізації до того и
іншого класу розпізнавання визначається за алгоритмом:
1. Сформувати екзаменаційну вектор-реалізацію.
2. Бінеаризувати екзаменаційну вектор-реалізацію за допомогою системи контрольних допусків, отриманої на другому етапі алгоритму навчання.
3. Розрахувати функції належності екз. реалізації до контейнерів всіх класів розпізнавання.
4. За значеннями функцій належності прийняти рішення :
4.1 Всі значення функцій належності від’ємні прийняти рішення про неналежність поточної вектор-реалізації до жодного з класів.
4.2 Серед значень функцій належності є додатні-прийняти рішення про належність екз. реалізації до класу, значення належності до котрого(серед додатних) є максимальним.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.