Вхідний математичний опис формується у вигляді матриць типу «об’єкт-властивість», по стовпцям котрих розміщено значення ознак розпізнавання, по строкам –вектори реалізації (фіксована в певний момент часу вся множина ознак розпізнавання). Кількість матриць відповідає кількості станів об’єкта та кількості стратегій або ж рішень.
Контейнери в рамках МФСВ мають форму гіперсфер, тому процес формалізації досвіду (або ж навчання) полягає у визначенні параметрів контейнерів, тобто радіусів та центрів(еталонних векторів-реалізацій) гіперсфер, що описують реалізації кожного класу.
Тобто фактично процес навчання полягає в тому, що з навчальних матриць отримують параметри контейнерів.
Процес функціонування, або ж екзамен - це реалізація алгоритму визначення належності поточної реалізації до контейнерів класів розпізнавання.
Навчання+екзамен= готова система підтримки прийняття рішень (СППР) в рамках методу функціонально-статистичних випробувань.
1. Формування вхідного математичного опису.
2. Формування бінарної навчальної матриці.
3. Розрахунок еталонних векторів (центрів), контейнерів класів розпізнавання.
4. Розрахунок масиву PARA.
5. Розрахунок масиву кодових відстаней SK.
6. Розрахунок оптимальних радіусів контейнерів.
7. Реалізація алгоритму екзамену – алгоритму прийняття рішення.
Вхідний математичний опис – це m вимірна матриця типу «об’єкт властивість», по строкам котрої заходяться реалізації, а по стовбцям ознаки. Тут m-кількість класів розпізнавання.
Позначають таку матрицю латинською літерою Y.
Етапи формування навчальної матриці наступні:
1. Обрати критерій функціонування СППР. Тобто який стан об’єкта дослідження або керування є бажаним, визначити всі інші можливі стани об’єкта керування що можуть негативно впливати на критерій функціонування.
2. Відповідно до критерію функціонування визначити множину ознак розпізнавання.
3. Визначити кількість класів розпізнавання що відповідають функціональним станам об’єкта.
4. Визначити кількість реалізацій що описують функціональний стан об’єкта.
5. Сформувати навчальну матрицю.
В результаті виконання даного пункту буде вияснено які ознаки дозволяють ідентифікувати перебування об’єкта в різних станах, скільки в залежності від критерію функціонування можна виділити функціональних станів об’єкта, сформувати набір векторів реалізацій, що є типовими для того чи іншого стану.
Як вже було написано вище, процес навчання для ЕОМ ми розглядаємо як процес формування гіперсферичних контейнерів, що є аналогом сформованих у людини образів.
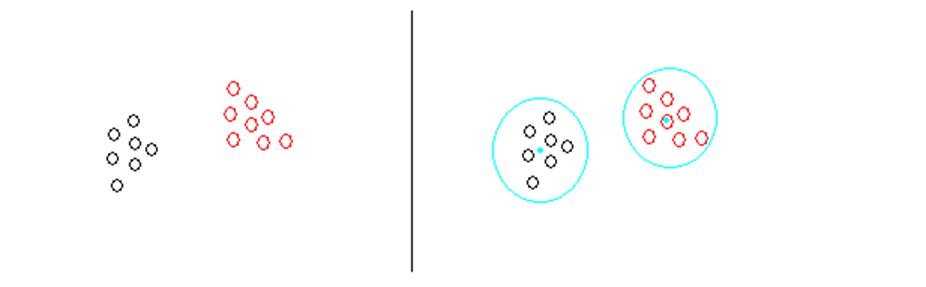
На практиці, щоб описати контейнер, необхідно знайти центр скупчення наших реалізацій та обрати певний радіус. На рисунку 1 зображено приклад формування контейнерів. При цьому треба користуватися умовою вибору радіусу. Нам треба узагальнити наш досвід, тобто формалізувати усі без виключення реалізації, тому за радіус оберемо відстань до максимально віддаленої реалізації. Отримані в правій частині рис1. контейнери повністю відповідають вищесказаному.
Розглянемо іншу ситуацію, коли характерні випадки, що описують два різних стани об’єкта, є досить схожими між собою.
В такому випадкові, скориставшись попередніми твердженнями для побудови контейнерів, ми отримаємо такі результати(рис.2)
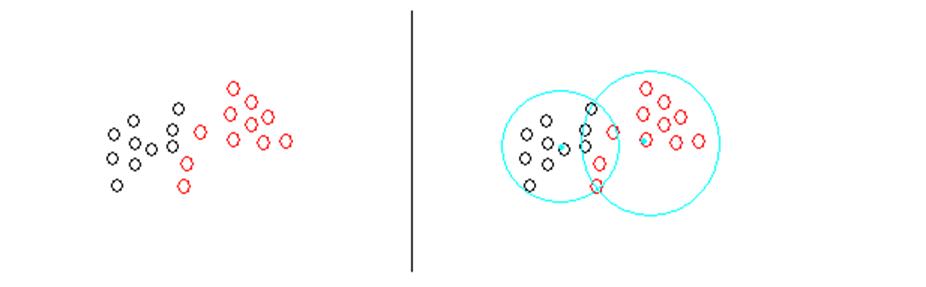
Аналіз рисунку показує, що щось у нас пішло не так. Ми отримали контейнери, що перетинаються. Погано в них те, що в перетин потрапляють реалізації. Отже отриманий нами досвід є досить розмитим, оскільки не дозволяє всі реалізації чітко асоціювати з
певними станами об’єкта. Тому на практиці , коли деяка поточна реалізація потрапить в область перетину, буде важко визначити належність її до якогось конкретного класу.
В практичних задачах керування часто має місце не чітка компактність реалізації різних класів, тобто перетин областей локалізації значень.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.