Белый шум ![]() на выходе полосового фильтра
преобразуется в гауссову стационарную помеху с корреляционной функцией [2]:
на выходе полосового фильтра
преобразуется в гауссову стационарную помеху с корреляционной функцией [2]:
![]() (3.1)
(3.1)
где ![]() – дисперсия сигнала;
– дисперсия сигнала; ![]() – ширина спектра сигнала;
– ширина спектра сигнала; ![]() – центральная частота сигнала –
неизвестные параметры на фоне гауссовой стационарной помехи с известной
корреляционной функцией. Тогда задача обнаружения соответствует обнаружению
шумового гауссова стационарного сигнала с неизвестной формой и известной
корреляционной функцией (3.1). При этом полагается, что ширина спектра сигнала
не превышает ширины спектра помехи. Постоянная интегрирования Т
определяется временем существования сигнала Тс.
– центральная частота сигнала –
неизвестные параметры на фоне гауссовой стационарной помехи с известной
корреляционной функцией. Тогда задача обнаружения соответствует обнаружению
шумового гауссова стационарного сигнала с неизвестной формой и известной
корреляционной функцией (3.1). При этом полагается, что ширина спектра сигнала
не превышает ширины спектра помехи. Постоянная интегрирования Т
определяется временем существования сигнала Тс.
Таким образом, при подаче
на вход исследуемого звена когерентного обнаружителя процесса ![]() выходное напряжение можно представить
в виде:
выходное напряжение можно представить
в виде:
 (3.2)
(3.2)
где ![]() –
импульсная характеристика интегратора.
–
импульсная характеристика интегратора.
Эпюры спектрального представления сигала и помехи при прохождении через НЭ и Инт представлены на рисунках .
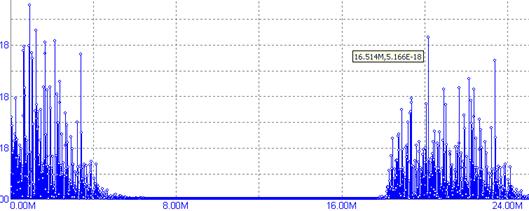
Рисунок1. Спектр помехи на выходе НЭ
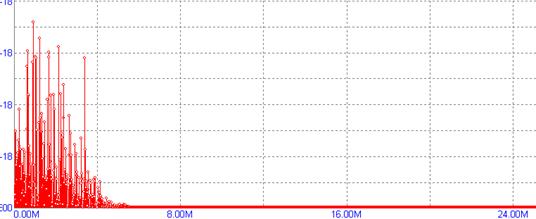
Рисунок1. Спектр помехи на выходе Инт
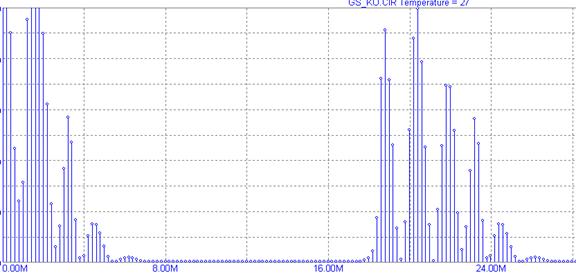
Рисунок1. Спектр сигнала на выходе НЭ
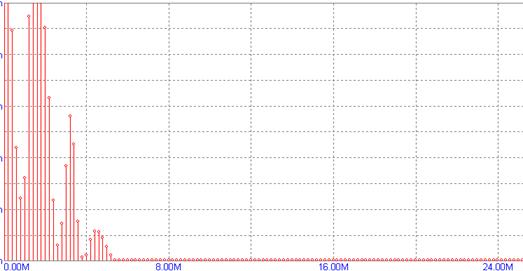
Рисунок1. Спектр сигнала на выходе Инт
Предполагая, что для
когерентного обнаружителя отношения сигнал/помеха на входах НЭ одинаковы ![]() , что возможно с учетом линейности
ЛТП при одинаковых значениях в каналах коэффициентов шума
, что возможно с учетом линейности
ЛТП при одинаковых значениях в каналах коэффициентов шума ![]() и эффективных шумовых полос
и эффективных шумовых полос ![]() .
.
Отношение сигнал/помеха
на выходе обнаружителя ![]() в момент отсчета
в момент отсчета ![]() определяется отношением приращения
среднего значения процесса
определяется отношением приращения
среднего значения процесса ![]() на выходе коммутируемого интегратора
на выходе коммутируемого интегратора ![]() , обусловленного присутствием
сигнала, к среднеквадратическому значению флюктуаций процесса
, обусловленного присутствием
сигнала, к среднеквадратическому значению флюктуаций процесса ![]() на выходе интегратора [4]:
на выходе интегратора [4]:
 (3.3)
(3.3)
где ![]() – математическое ожидание
– математическое ожидание ![]() при воздействии на обнаружитель помехи
при воздействии на обнаружитель помехи ![]() ,
, ![]() – математическое ожидание
– математическое ожидание ![]() при воздействии на обнаружитель процесса
при воздействии на обнаружитель процесса ![]() ,
, ![]() – второй начальный момент напряжения
– второй начальный момент напряжения ![]() при воздействии на обнаружитель процесса
при воздействии на обнаружитель процесса ![]() ;
; ![]() – дисперсия напряжения
– дисперсия напряжения ![]() при воздействии на обнаружитель процесса
при воздействии на обнаружитель процесса ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.