Входные сигналы:
Для того, чтобы объект автоматизации функционировал в соответствии с технологическими требованиями, нужно прежде всего, определить минимально необходимое число входных сигналов и сформулировать условия их появления и исчезновения. В качестве командных органов, формирующих входные воздействия в дискретных системах, могут быть использованы сигналы кнопок, переключателей, конечных выключателей, датчиков различных параметров и т.п.
Примем следующие входные сигналы:
Х1 - Этот сигнал является эквивалентным для сигналов общего управления агрегатом: подачи напряжения на схему, подачи сигнала начало цикла, отсутствие воздействия на аварийные кнопки «стоп» и т.п. При отсутствии сигнала XI работа накопителя невозможна.
Х2 - режим наладки.
ХЗ - щит находится в конце транспортера.
Х4 - щит полностью находится на подъемном столе.
Х5 - подъемный стол находится в нижнем положении.
Х6 - подъемный стол находится в верхнем положении.
Х7 - стопа достигла заданной высоты.
Х8 - пуск транспортера.
Х9 - остановка транспортера.
XI0 - тепловое реле двигателя транспортера.
Х11 - подъемный стол движется в верх.
Х12 - подъемный стол пресс движется в низ.
XI3 - аварийный стоп.
Выходные сигналы:
В качестве исполнительных элементов в автоматических системах используют гидро и пневмоцилиндры, электрические двигатели, муфты и магниты, дифрагменные пневматические и гидравлические лопастные механизмы и т.д.
На уровне систем управления к исполнительным можно отнести такие элементы, срабатывание которых вызывает включение перечисленных выше двигателей, цилиндров и т.п. Здесь речь идет о магнитных пускателях, контакторах, электромагнитах, управляющих цилиндрах. К этой же категории можно отнести различного рода сигнальные лампы, вторичные приборы, сирены, звонки и т.д.
Y1 - сигнал включения транспортера.
Y2 - сигнал к началу подъема стола.
Y3 - сигнал к началу опускания стола.
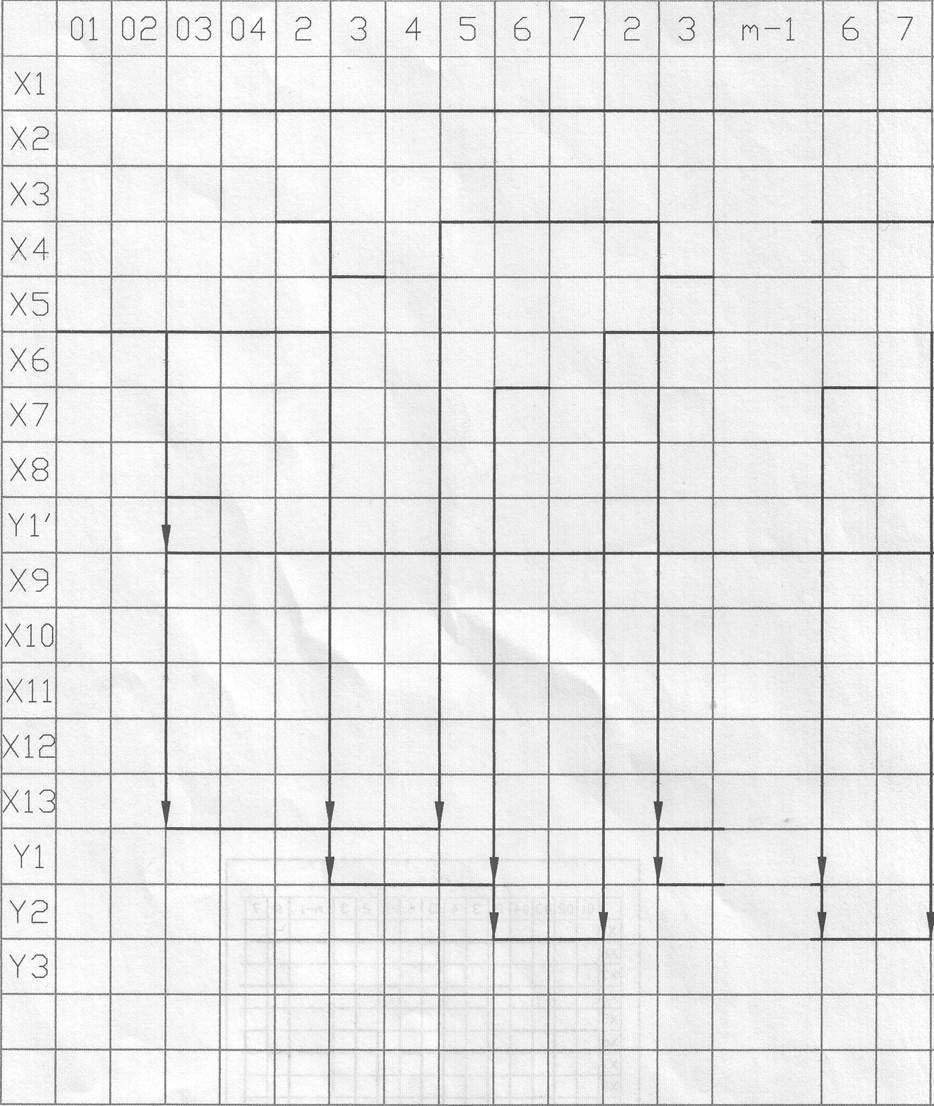
Составить логическое уравнение и циклограмму работы объекта:
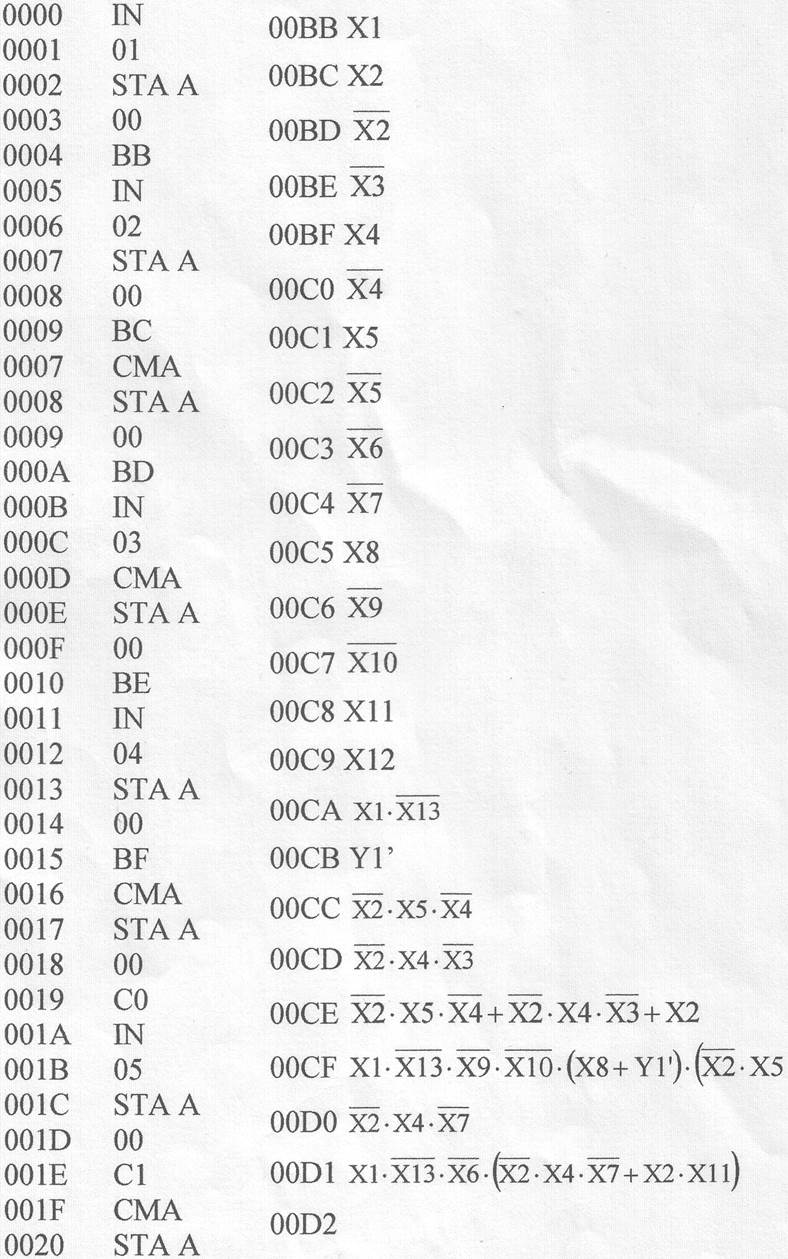
Y1 = X1-X13-X9-X10-(X8 +У1)-(Х2-(Х5*Х4 + Х4-Х3)+Х2)
Y2 = XI • Х13 • Х6 • (Х2 • Х4 • Х7 + Х2 • X11)
Y3 = XI • Х13 • Х5 • (Х2 + Х12 • Х2)
Циклограмма представлена на схеме 1.
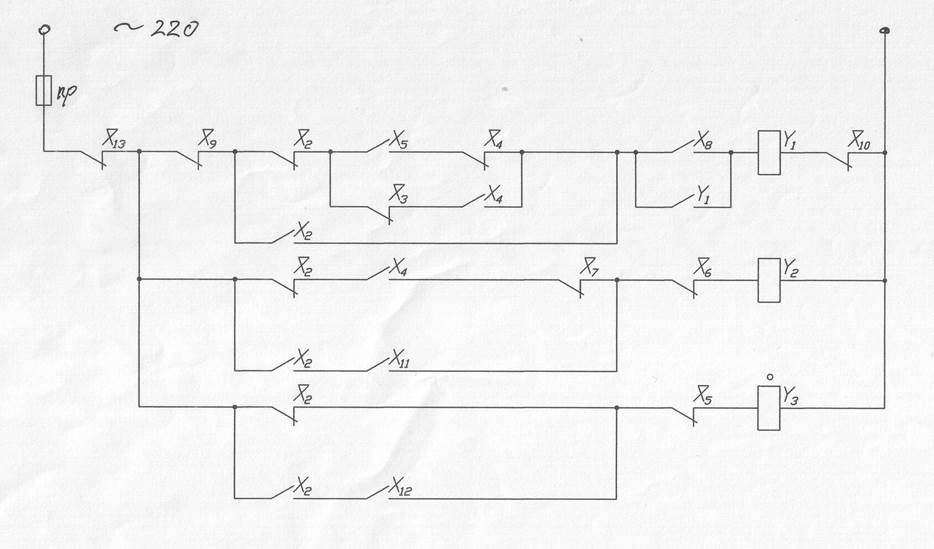
На основе логического уравнения составить контактную схему
управления:
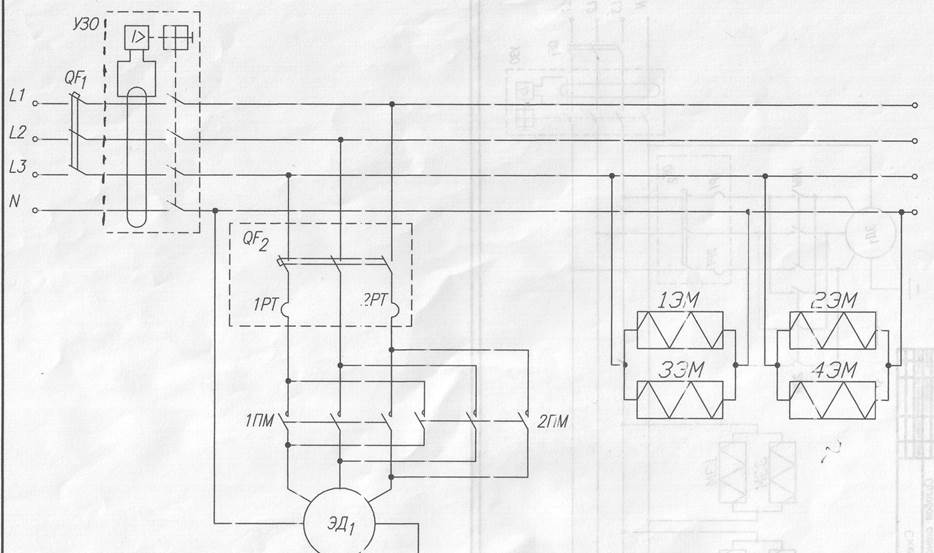
Контактная схема управления представлена на схеме 2, силовая схема представлена на схеме 3.
Выбор технических средств:
Х1 - АП-50 ЗМТ (устройство защиты)
Х2 - ВК16-19Б22121-40ТЗ (кнопка с механической фиксацией)
ХЗ -ВК-211 (выключатель конечный)
Х4 - ВК-211 (выключатель конечный)
Х5 -ВКМ-441 (выключатель конечный)
Х6 - ВКМ-441 (выключатель конечный)
Х7 - ВКМ-441 (выключатель конечный)
Х8 -ВК16-19Б42123-40ТЭ (кнопка с электромагнитной фиксацией)
Х9 - ВК16-19Б42120-40ТЗ (кнопка без фиксации)
Х10-РТ-15
Х11 -ВК16-19Б42120-40ТЗ (кнопка без фиксации)
Х12 - ВК16-19Б42120-40ТЗ (кнопка без фиксации)
Х13 -ВК16-19Б42120-40ТЗ (кнопка без фиксации)
Y1 -П-300 (электромагнит пускателя двигателя)
Y2 - ЭС-5100 (электромагнит для управления гидрозолотником)
Y3 - ЭС-5100 (электромагнит для управления гидрозолотником)
Предохранитель должен быть рассчитан на силу тока 1,2 А
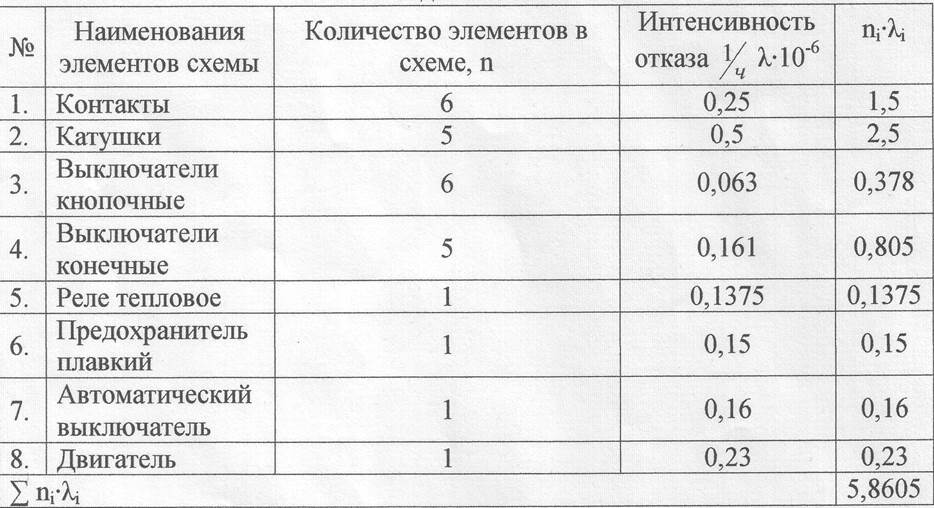
Расчет надежности схемы:

Провести резервирование:
Для резервирование выбираем самый ненадежный элемент. Зарезервируем катушки:
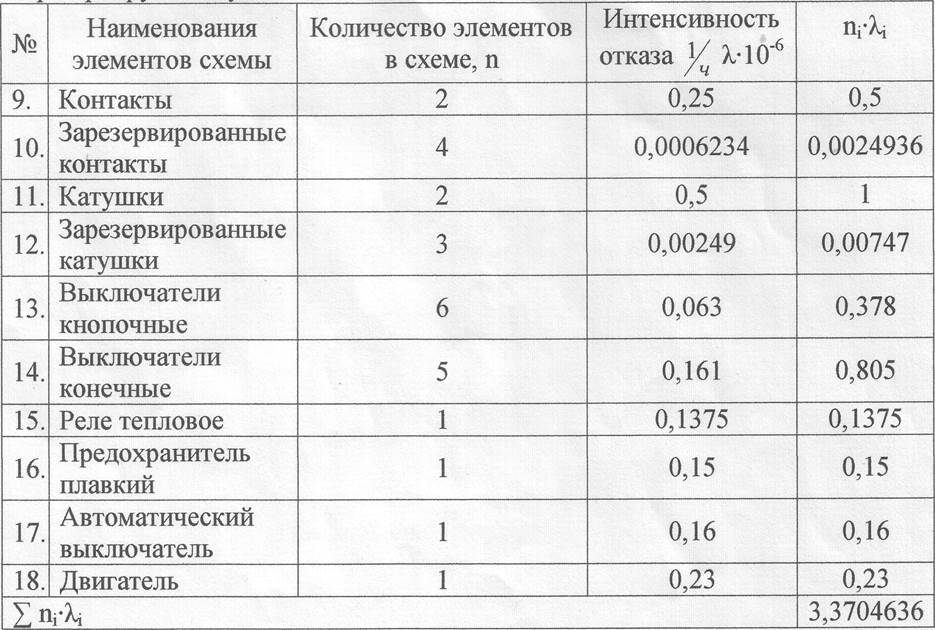

После резервирования схема управления и силовая схема были изменены,изменения отражены на схемах 4,5
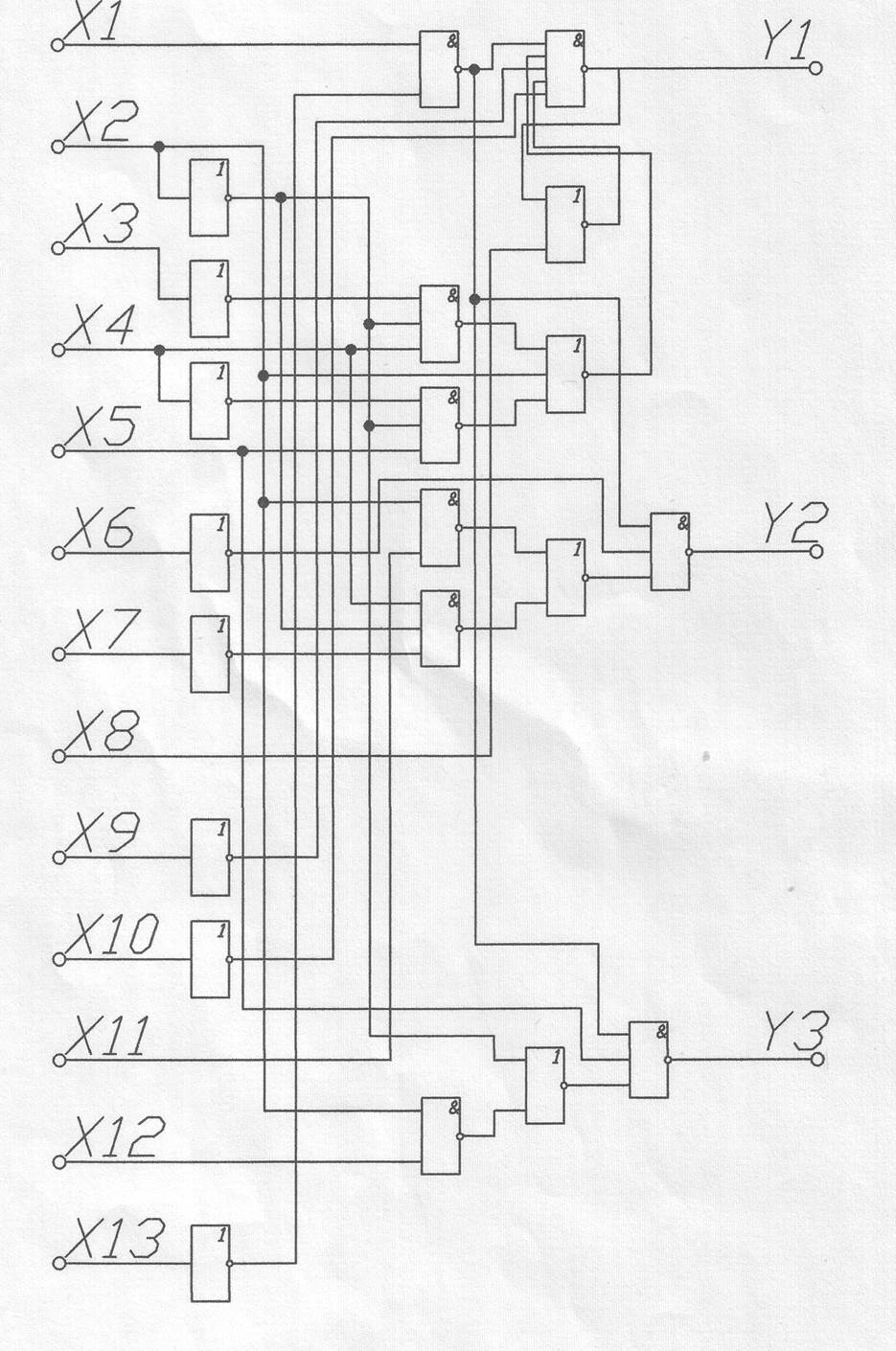
Составить схему управления на бесконтактных элементах:
Схема представлена на схеме 6.
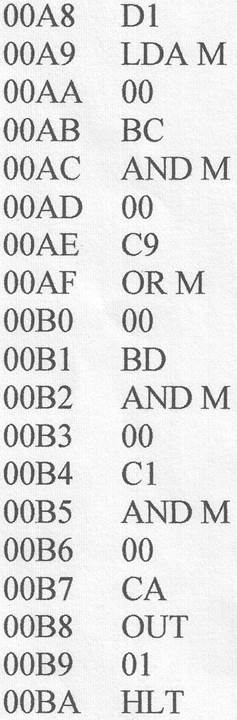
Составить программу управления для программируемого контроллера:




Контактная схема управления
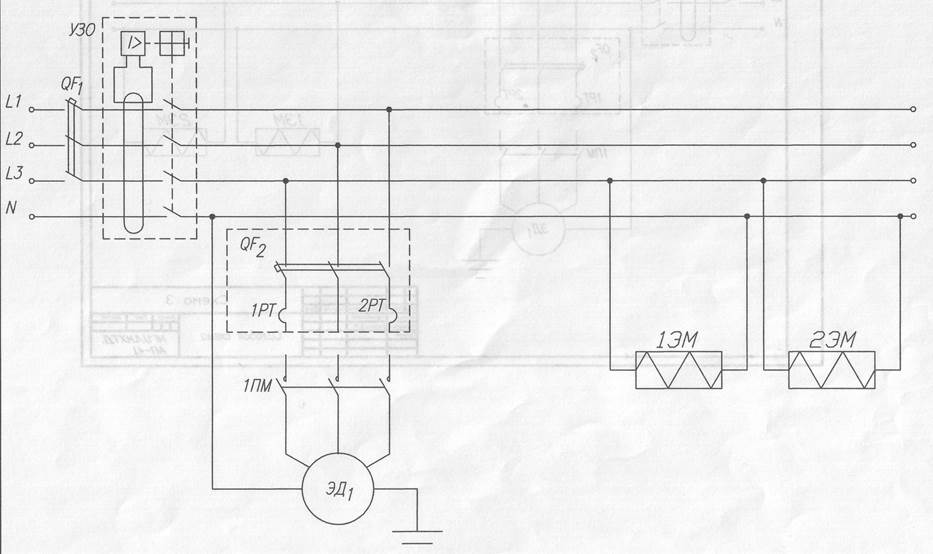
Силовая схема
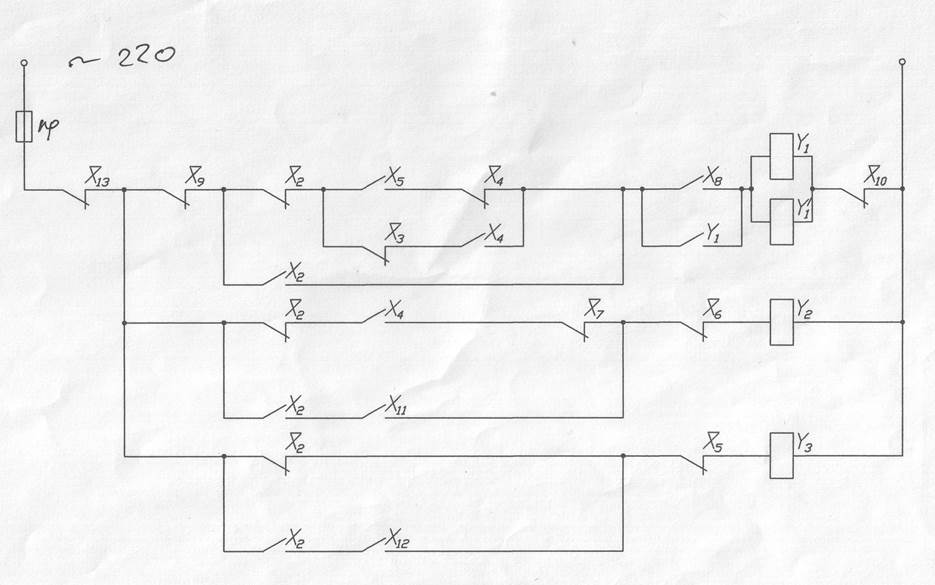
Контактная схема после резервирования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.