Шаговые двигатели. В промышленных роботах получил широкое распространение дискретный привод с шаговыми двигателями (ШД). Принцип действия ШД основан на дискретном изменении магнитного потока в зазоре машины при периодических переключениях обмоток статора. При этом направленная магнитодвижущая сила статора изменяется на определенный угол, вызывая поворот статора на тот же угол (шаг). Применение ЩД позволяет преобразовывать управляющие импульсы в угол поворота вала. Промышленность изготавливает различные модификации ШД, отличающихся по принципу действия, способу управления, конструкции (табл. 4.4).
Принцип действия ШД с многофазной обмоткой на статоре и роторе в виде постоянного магнита заключается в следующем. При подаче однополярных импульсов напряжения последовательно в фазы 1,2,..., m ротор будет поворачиваться на угол, при котором его ось совпадает с осями фаз 1, 2, ..., m. Тогда ротор имеет несколько устойчивых состояний, определяемых на-
Таблица 4.4
Технические характеристики шаговых двигателей.
|
Параметр |
ШД10/100 |
ШД-16 |
ШД-1А |
ШДР-231 |
ШДА-1 |
ШДА-6 |
ШД-2-3 |
РШД-28 |
ДШ-0,1 |
ДШ-0,025A |
|
Номинальное напряжение в импульсе, В Угловой шаг, град Максимальная частота следования импульсов, Гц Максимальный
синхронизирующий момент, Н Начальный момент нагрузки,
Н Максимальный момент инерции
нагрузки, г Потребляемая мощность, Вт Масса, г |
14 15 100 _ 0,098 1,96 2,2 80 |
25 15 400 _ 0,068 1,96 7,0 140 |
25 15 100 _ 1,470 8,0 6,5 460 |
13,5 9 1500 _ 0,4 0,39 9,5 150 |
28 22,5 400 _ 0,39 2,94 _ 125 |
28 22,5 260 _ 15,6 98,0 _ 1100 |
27 15 320 9,8 0,98 7,0 37,0 _ |
24 1 2000 35,0 2,5 25,0 300,0 1500 |
27 22,5 430 11,8 _ 18,6 30,0 500 |
13,5 5 2500 1,5 _ 0,7 30,0 360 |
правлением вектора МДС (рис. 4.10,а). Шаг изменения
этого направления равен 2![]() /т.
/т.
Если подавать импульсы напряжения на две соседние
фазы, то направление МДС Fpeз (рис. 4.10,6) совпадает со средней линией между
фазами. При подаче импульса на три фазы МДС Fpeз совпадает с осью средней фазы (рис. 4.10,в). Таким
образом, включая поочередно четное и нечетное число фаз, ротор двигателя будет
иметь два устойчивых положения при шаге
![]() /т.
/т.
Статор обычно выполняется с одним полюсом, на котором располагаются катушки многофазной обмотки. В динамике ШД представляет собой нелинейный импульсный элемент. Передаточная функция определяется для каждого конкретного случая.
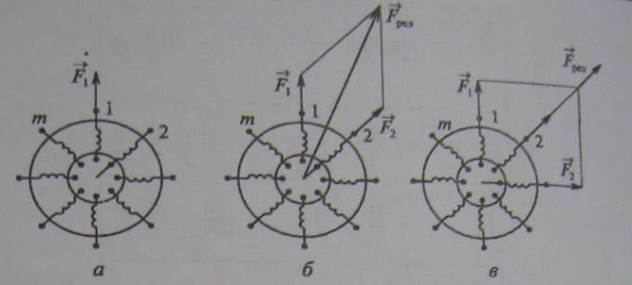
Рис. 4.10. Схема принципа действия шагового двигателя: а — с многофазной обмоткой на статоре и ротором в виде постоянного магнита; б—с подачей импульса на две соседние фазы; в — с подачей импульса на три фазы
Список литературы.
1. Л.В. Леонов, A.A.Кудинов. Роботехнические производственные комплексы в лесной и деревообрабатывающей промышленности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.