Взаимное
влияние кинематических цепей ПР, двигатели которого расположены в общем
моторном блоке, заключается в обеспечении взаимно однозначного соответствия
между поворотом i-гo звена в n-м шарнире на угол ![]() и поворотом
вала соответствующего двигателя на угол
и поворотом
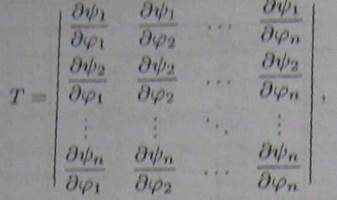
вала соответствующего двигателя на угол ![]() . Связь
кинематических цепей описывается матрицей частных
передаточных отношений
. Связь
кинематических цепей описывается матрицей частных
передаточных отношений
|
|
( 4.62)
где
элементы каждого столбца являются передаточными
отношениями в механизме с одной степенью подвижности
при фиксации всех углов ![]() поворота звеньев, кроме
поворота звеньев, кроме ![]() 1,2,...,n. Необходимым и достаточным условием развязки
кинематических цепей является диагональность матрицы Т. Это достигается
включением в кинематическую цепь специальных компенсирующих дифференциальных
механизмов.
1,2,...,n. Необходимым и достаточным условием развязки
кинематических цепей является диагональность матрицы Т. Это достигается
включением в кинематическую цепь специальных компенсирующих дифференциальных
механизмов.
Механизмы уравновешивания компенсируют влияние статических моментов oт масс звеньев манипулятора и обеспечивают снижение требуемой мощности привода. Они применяются и тех конструкциях ПР, где двигатели расположены непосредственно на подвижных звеньях. Выполняются они в виде пружинных, гидравлических или пневматических цилиндров.
В пружинных уравновешивателях момент Му упругой силы, создаваемой пружиной, определяется ее жесткостью, схемой ее установки и текущим положением звена,
Грузовые уравновешиватели, или противовесы, просты по конструкции, но инерционны. Их момент
 (4.63)
(4.63)
где
![]() -момент инерции движущихся
частей; G- масса противовеса; g- ускорение свободного падения;R-радиус инерции (расстояние от оси до центра тяжести
противовеса).
-момент инерции движущихся
частей; G- масса противовеса; g- ускорение свободного падения;R-радиус инерции (расстояние от оси до центра тяжести
противовеса).
Электропривод
выбирают на основании: динамических свойств при пуске, торможении и изменении
нагрузки; диапазона регулирования скорости; характера
нагрузки; требуемой точности поддержании заданного режима; частоты
включения. Методика проектирования приводов
манипуляторов изложена и литературе [2]. Для выбора двигателя постоянного
тока необходимы
следующие данные:![]() - угол поворота оси механизма, рад,
- угол поворота оси механизма, рад,
соответствующий максимальному перемещению исполнительного
Таблица 4.1
Характеристики исполнительных механизмов манипуляторов.
|
|
|
|
|
||
|
|
|
|
|
||
|
0,56 1,13 1,69 2,25 2,77 3,11 4,47 6,23 7,78 |
0,76 0,59 0,47 0,39 0,32 0,29 0,21 0,15 0,12 |
1,31 1,70 2,14 2,59 3,11 3,42 4,76 6,54 8,34 |
0,57 0,46 0,41 0,39 0,37 0,36 0,35 0,34 0,34 |
0,67 0,52 0,41 0,34 0,29 0,26 0,18 0,14 0,11 |
1,24 1,57 1,97 2,40 2,85 3,13 4,48 5,86 7,26 |
органа; tp и to—длительность
работы и паузы, с; ![]() =
= ![]() +
+![]() - время цикла, с; JM — момент инерции исполнительного
механизма, кгм2; Мс
— статический момент нагрузки на выходном валу, Нм. Расчет ведут, исходя из
минимального значения требующегося момента двигателя.
- время цикла, с; JM — момент инерции исполнительного
механизма, кгм2; Мс
— статический момент нагрузки на выходном валу, Нм. Расчет ведут, исходя из
минимального значения требующегося момента двигателя.
Изменение
скорости характеризуется величиной ![]() .При
.При ![]() =0 диаграмма скорости имеет треугольный вид, при
=0 диаграмма скорости имеет треугольный вид, при ![]() 0 — трапецеидальный. Отношение моментов,
определяющее параметры исполнительного механизма,
0 — трапецеидальный. Отношение моментов,
определяющее параметры исполнительного механизма,
 ( 4.64)
( 4.64)
Параметры  представлены в табл. 4.1. По дан-
представлены в табл. 4.1. По дан-
ным
таблицы строят зависимости ![]() =
=![]() ;
; ![]() =
= ![]() (
(![]() );
); 
и
определяют коэффициенты, характеризующие оптимальный режим; ![]() =
= - скорость (рад/с) установившегося движения
- скорость (рад/с) установившегося движения
входной оси механизма. Эквивалентная мощность механизма
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.