Министерство образования и науки Российской Федерации
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ МЕХАТРОНИКИ И АВТОМАТИЗАЦИИ
Кафедра электропривода и автоматизации промышленных установок

Расчётно-графическое задание
Задача 1, 2, 3
Вариант 51
Выполнил:
![]()
![]()
![]() Студент
гр. ЭМ – 51 « » 2008 г.
Солнцев А.С.
Студент
гр. ЭМ – 51 « » 2008 г.
Солнцев А.С.
Проверил:
![]()
![]()
![]() К.т.н.,
доцент « » 2008
г. Абакумов И.Д.
К.т.н.,
доцент « » 2008
г. Абакумов И.Д.
Новосибирск 2008
Технические данные электродвигателя 4MTF(H) 112LB6:
![]() − номинальная мощность;
− номинальная мощность;
![]() – номинальное напряжение;
– номинальное напряжение;
![]() − частота питающей сети;
− частота питающей сети;
![]() − номинальная частота вращения;
− номинальная частота вращения;
![]() − максимальная частота вращения;
− максимальная частота вращения;
![]() – максимальный момент;
– максимальный момент;
![]() – момент инерции электродвигателя;
– момент инерции электродвигателя;
![]() − продолжительность включения;
− продолжительность включения;
![]()
![]() – число ступеней пуска.
– число ступеней пуска.
Статор:
![]() − номинальный ток статора;
− номинальный ток статора;
![]() − коэффициент мощности в номинальном режиме;
− коэффициент мощности в номинальном режиме;
![]() − ток холостого хода;
− ток холостого хода;
![]() − коэффициент мощности при холостом ходе;
− коэффициент мощности при холостом ходе;
![]() ;
;
![]() − активное сопротивление обмотки;
− активное сопротивление обмотки;
![]()
![]() − индуктивное сопротивление обмотки;
− индуктивное сопротивление обмотки;
Ротор:
![]() − номинальная эдс ротора;
− номинальная эдс ротора;
![]() − номинальный ток ротора;
− номинальный ток ротора;
![]() − активное сопротивление обмотки;
− активное сопротивление обмотки;
![]() − индуктивное сопротивление обмотки;
− индуктивное сопротивление обмотки;
![]()
![]() − коэффициент приведения обмоток.
− коэффициент приведения обмоток.
![]() − сопротивление обмоток при
− сопротивление обмоток при ![]() .
.
Технические данные механизма подъёма:
![]() −
диаметр барабана;
−
диаметр барабана;
![]() −
масса поднимаемого груза;
−
масса поднимаемого груза;
![]() −
передаточное число редуктора;
−
передаточное число редуктора;
![]() −
высота подъёма груза;
−
высота подъёма груза;
![]() .
.
Кинематическая схема механизма подъёмника представлена на рисунке 1.
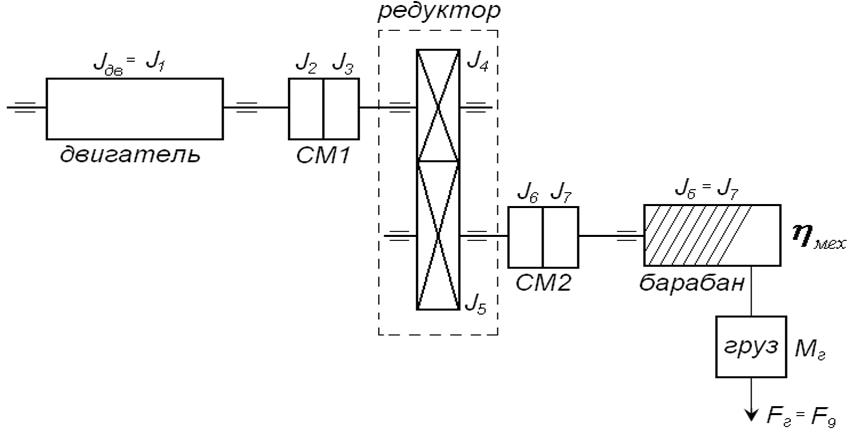
Рисунок 1 Кинематическая схема механизма подъёмника
Принимаем механическую схему электродвигателя жёсткой одномассовой, т.е. не учитываем упругие деформации в кинематических звеньях привода.
Задача №1
Пункт 1
Привести моменты
инерции движущихся инерционных масс привода к скорости вращения
электродвигателя. Определить суммарный момент инерции расчётной эквивалентной
механической системы привода. При этом принять суммарный момент инерции
соединительных муфт и шестерни редуктора, вращающихся со скоростью двигателя ![]() , равным
, равным ![]() , а суммарный момент инерции
соединительных муфт и шестерни редуктора, вращающихся со скорость механизма
, а суммарный момент инерции
соединительных муфт и шестерни редуктора, вращающихся со скорость механизма ![]() , равным
, равным ![]() .
.
На рисунке 2 представлена расчётная схема механизма.
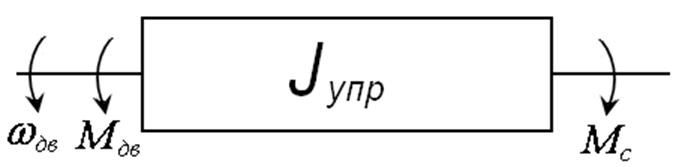
Рисунок 2. Расчётная схема механизма
Общее управление движения электропривода:
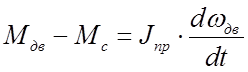 ,
,
где ![]() −
момент электродвигателя;
−
момент электродвигателя;
![]() − статический момент
сил сопротивления;
− статический момент
сил сопротивления;
![]() − момент инерции
приведённой системы.
− момент инерции
приведённой системы.
Расчёт ![]() выполним из условия
равенства кинетической энергии реальной схемы и кинетической энергии
приведенной массы
выполним из условия
равенства кинетической энергии реальной схемы и кинетической энергии
приведенной массы ![]() .
.
Приведём моменты инерции движущихся инерционных масс привода к скорости вращения электродвигателя. Кинематическая схема электропривода показана на рисунке 1.
Принимаем:
![]() и
и
![]() .
.
Тогда с учётом этого запишем уравнение:
где ![]() − энергия электродвигателя;
− энергия электродвигателя;
![]() −
энергия барабана;
−
энергия барабана;
![]() −
энергия груза;
−
энергия груза;
 −
суммарная энергия соединительных муфт СМ1 и шестерни редуктора, вращающихся со
скоростью двигателя
−
суммарная энергия соединительных муфт СМ1 и шестерни редуктора, вращающихся со
скоростью двигателя ![]() ;
;
 −
суммарная энергия соединительных муфт СМ2 и колеса редуктора, вращающихся со
скоростью барабана
−
суммарная энергия соединительных муфт СМ2 и колеса редуктора, вращающихся со
скоростью барабана ![]() .
.
Т.к. ![]() и
и  ,
то можно записать:
,
то можно записать:

Помножим это уравнение
на ![]() , тогда получим:
, тогда получим:

Введём обозначения:
 .
.
Запишем:
Подставив численные значения, получим:
 .
.
Пункт 2
Определить приведенные к скорости вращения электродвигателя моменты статического сопротивления для двух режимов работы электродвигателя:
1. Двигательный режим при подъёме груза.
2. Генераторный режим (торможения) при спуске груза.
При этом КПД механизма принять равным ![]() , а КПД редуктора
, а КПД редуктора ![]() .
.
1. Для двигательного режима работы:
Приведение моментов статического сопротивления осуществляется на основе равенства элементарных работ, выполняемых в реальной и эквивалентной расчётных схемах.
Работа, совершаемая электродвигателем:
![]() .
.
Работа, затрачиваемая на вращение механизма:
![]() ,
,
где ![]() − время работы электродвигателя.
− время работы электродвигателя.
Часть работы двигателя затрачивается на потери в редукторе и в рабочем органе, эти потери учитывают КПД механизма и редуктора.
![]() и
и
![]()
Работа, затрачиваемая на подъём груза:
![]() .
.
Учёт потерь в механизме:
 .
.
После учёта потерь в механизме получим:
 .
.
Учитывая, что  и
и ![]() ,
получим:
,
получим:
 .
.
Приведём механический момент к скорости вращения электродвигателя с учётом потерь в редукторе:
 ,
тогда
,
тогда
 ,
,
 ,
,
подставим численные значения:
 .
.
2. Генераторный (тормозной) режим работы электродвигателя:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.