











Новосибирский государственный технический университет
Кафедра ЭАПУ

Расчетно-графическое задание
по дисциплине “Основы электропривода”
Выполнил:
Студент: Щеглов Т.В.
Факультет: ЭМ
Группа: ЭМ-39
Вариант: 93
Преподаватель: Иванов Г.Я.
Новосибирск 2006
Исходные данные:
Электродвигатель: асинхронный, типа 4MTF(H)-160LB8.
Механизм:

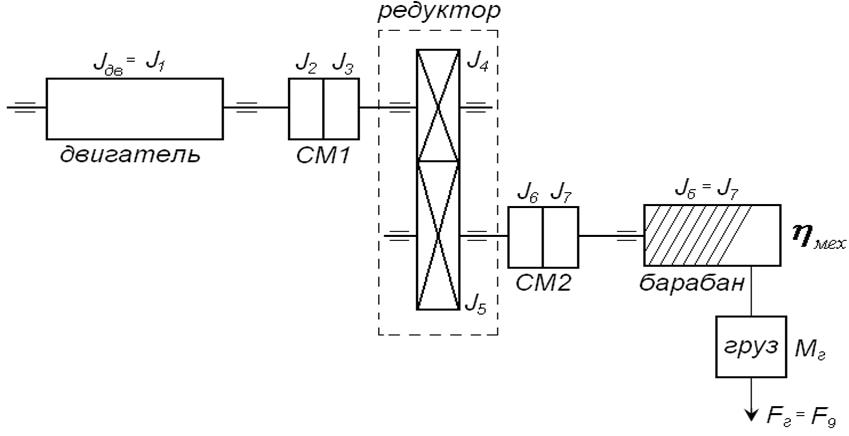
Рис.1. Кинематическая схема привода.
Задача№1. механизм подъёма крана приводится в движение асинхронным двигателем (АД). Кинематическая схема механизма приведена на (Рис.1), а технические данные приведены в выше на 1-й странице.
Приняв механическую схему электродвигателя жёсткой одно массовой (упругие деформации в кинематических звеньях привода не учитываются).
Требуется:
1. Привести моменты инерции движущихся
инерционных масс привода к скорости вращения электродвигателя. Определить
суммарный момент инерции расчётной эквивалентной механической системы привода.
При этом принять суммарный момент инерции соединительных муфт и шестерни
редуктора, вращающихся со скоростью механизма ![]() ,
равным
,
равным ![]() , а суммарный момент
инерции соединительных муфт и шестерни редуктора, вращающихся со скорость
механизма
, а суммарный момент
инерции соединительных муфт и шестерни редуктора, вращающихся со скорость
механизма ![]() , равным
, равным ![]() .
.
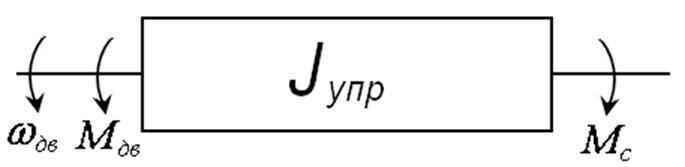
Рис.2. Расчётная схема механизма.
Общее управление движения электропривода:
Расчёт ![]() выполним из условия равенства
кинетической энергии реальной схемы и кинетической энергии приведенной массы
выполним из условия равенства
кинетической энергии реальной схемы и кинетической энергии приведенной массы  .
.
Умножим это уравнение на 2 и разделим
на ![]() .
.

Введём обозначение:

2. Определить приведенные к скорости вращения электродвигателя моменты статического сопротивления для двух режимов работы электродвигателя:
a) Двигательный режим при подъёме груза.
b) Генераторный режим (торможения) при спуске груза.
При этом КПД механизма принять равным
![]() , а КПД редуктора
, а КПД редуктора  .
.
Момент, приведенный к валу двигателя при подъёме груза:

Момент, приведенный к валу двигателя при спуске груза:

Проверим условие, что ![]() :
:
Условие выполняется.
Характеристика представлена на (Рис3.).
3. Построить естественные скоростные и механические характеристики электродвигателя. Указать на них величину установившихся скоростей вращения двигателя при подъёме и спуске груза.
Для расчёта и построения статических механических характеристик АД рекомендуется использовать уравнения, полученные на основе упрощенной Г–образной схемы замещения и позволяющие получить достаточную (в пределах 5%) для инженерных расчётов точность.
В уравнениях приняты следующие обозначения:
![]() – электромагнитный момент АД и
соответствующее ему скольжение.
– электромагнитный момент АД и
соответствующее ему скольжение.
![]() – значение максимального (критического)
электромагнитного момента и соответствующее ему критическое скольжение.
– значение максимального (критического)
электромагнитного момента и соответствующее ему критическое скольжение.
![]() – активное
сопротивление фазной цепи ротора, приведенной к цепи обмотки статора.
– активное
сопротивление фазной цепи ротора, приведенной к цепи обмотки статора.
![]() – активное сопротивление фазной обмотки
ротора.
– активное сопротивление фазной обмотки
ротора.
![]() – коэффициент трансформации.
– коэффициент трансформации.
![]() – активное сопротивление фазной обмотки
статора.
– активное сопротивление фазной обмотки
статора.
![]() – активное сопротивление фазной обмотки
ротора.
– активное сопротивление фазной обмотки
ротора.
![]() – индуктивные сопротивления фазных
обмоток статора и ротора, приведенные к обмотке статора.
– индуктивные сопротивления фазных
обмоток статора и ротора, приведенные к обмотке статора.
![]() – индуктивное сопротивление рассеяния
фазной обмотки ротора.
– индуктивное сопротивление рассеяния
фазной обмотки ротора.
![]() – угловая скорость вращения ротора.
– угловая скорость вращения ротора.
![]() – линейная частота тока статора.
– линейная частота тока статора.
![]() – число пар полюсов обмотки статора.
– число пар полюсов обмотки статора.
Для расчёта и построения
статических механических характеристик АД используя эти уравнения при
номинальных значениях ![]() и отсутствии
добавочного сопротивления в цепи ротора
и отсутствии
добавочного сопротивления в цепи ротора ![]() .
Вначале рассчитываем значения
.
Вначале рассчитываем значения ![]() . Затем,
используя уравнение (1), задаёмся текущими значениями скольжения
. Затем,
используя уравнение (1), задаёмся текущими значениями скольжения ![]() в пределах
в пределах ![]() , рассчитываем текущее значение электромагнитного
момента
, рассчитываем текущее значение электромагнитного
момента ![]()
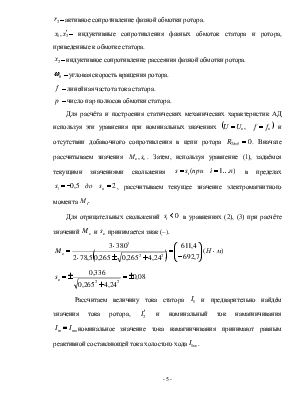
Для отрицательных
скольжений ![]() в уравнениях (2), (3)
при расчёте значений
в уравнениях (2), (3)
при расчёте значений ![]() и
и ![]() принимается знак (–).
принимается знак (–).

Рассчитаем величину тока
статора ![]() и предварительно найдём
значения тока ротора,
и предварительно найдём
значения тока ротора, ![]() и номинальный
ток намагничивания
и номинальный
ток намагничивания ![]() номинальное
значение тока намагничивания принимают равным реактивной составляющей тока холостого
хода
номинальное
значение тока намагничивания принимают равным реактивной составляющей тока холостого
хода![]() .
.
Все полученные данные занесены в таблицу 1.
Таблица 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.