Результаты расчетов переходных процессов сведены в таблицу 4:
Таблица 4
|
ТМ=0,091 |
ТМ=0,054 |
ТМ=0,033 |
ТМ=0,02 |
||||||||||
|
t |
с |
0 |
0,035 |
0,069 |
0 |
0,02 |
0,041 |
0 |
0,01 |
0,025 |
0 |
0,007 |
0,015 |
|
ω |
с-1 |
0 |
19 |
31,6 |
31,5 |
42,6 |
50,7 |
50 |
55,6 |
61,4 |
61,5 |
65,3 |
68,4 |
|
М |
Н·м |
500 |
380 |
300 |
500 |
383 |
299 |
500 |
401 |
300 |
500 |
389 |
301 |
Характеристики представлены на (Рис.8.).
Суммарное время разгона:
2. при динамическом торможении в конце подъёма груза на характеристике, рассчитанной в п 7, до полной остановки.
Расчёт переходных процессов сведён в таблицу 5:
Таблица 5
|
t |
с |
0 |
0,02 |
0,04 |
0,06 |
0,085 |
0,351 |
|
ω |
с-1 |
74,5 |
66,7 |
59,6 |
53,1 |
45,6 |
0 |
|
M |
Н·м |
-298,2 |
-267,2 |
-238,6 |
-212,4 |
-182,5 |
-0,1 |
Характеристики представлены на (Рис.9.).
Время торможения до полной остановки:
3. При торможении противовключением в
режиме спуска груза от начальной скорости ![]() (
(![]() -скорость электродвигателя на
естественной характеристике при спуске груза в режиме генераторного торможения
с рекуперацией энергии в сеть) до
-скорость электродвигателя на
естественной характеристике при спуске груза в режиме генераторного торможения
с рекуперацией энергии в сеть) до ![]() (
(![]() -установившаяся скорость при спуске
груза в режиме торможения противовключения, на реостатной характеристике
рассчитанной в п 5).
-установившаяся скорость при спуске
груза в режиме торможения противовключения, на реостатной характеристике
рассчитанной в п 5).

Расчёт переходных процессов сведён в таблицу 6:
Таблица 6
|
t |
с |
0 |
0,1 |
0,2 |
0,23 |
0,5 |
|
ω |
с-1 |
75,5 |
39,7 |
8,4 |
-0,2 |
-63,7 |
|
M |
Н·м |
-149,1 |
-121,2 |
-96,7 |
-90 |
-40,5 |
Характеристики представлены на (Рис.10.).
Из графика, представленного на (Рис.10.):
Задача №3.
Схема управления электроприводом представлена на (Рис.11.).
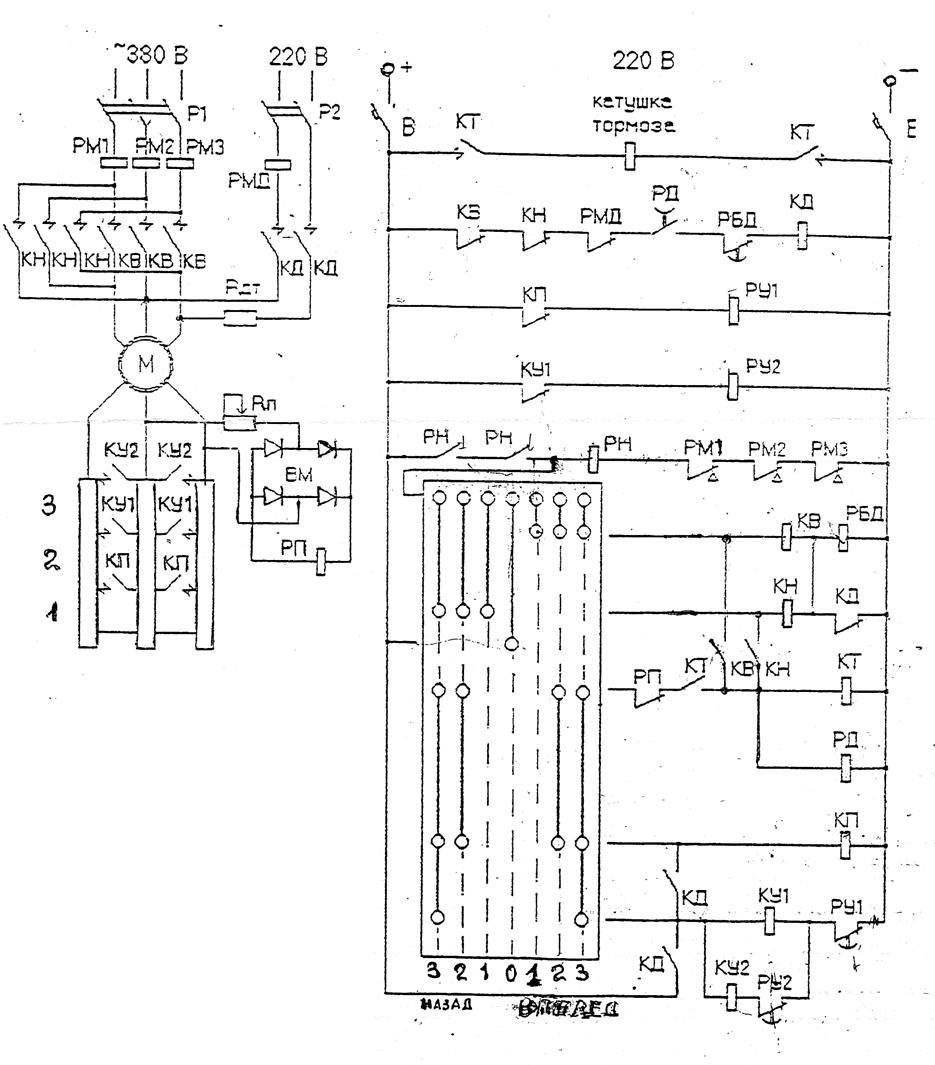
Рис.11. Схема управления электроприводом.
Обозначения на схеме:
КК – командоконтроллер
РУ1, РУ2 – реле ускорения 1-й, 2-й ступени
РН – реле напряжения
КВ, КН, КТ – контакторы “вперед”, ”назад”, “тормозной”
КП, КУ1, КУ2, КД – контакторы “пусковой”, “ускорения 1-й ступени”, “ускорения 2-й ступени”, “динамического торможения”
РД, РБД – реле динамического торможения, реле блокировки при динамическом торможении
РМ1, РМ2, РМ3 – реле максимальной защиты
Р1, Р2 – рубильники 1, 2
Работа схемы:
Пуск
1. Включить Р1, Р2 и кнопку В. (Рукоятка КК в нейтральном положении)
2. Получают питание РУ1, РУ2, РН по цепям:
Контакты РУ1 и РУ2 размыкаются, а контакт РН замыкается, образуя цепь питания.
3. Перевести рукоятку КК в положение “1” (Вперед).
Получают питание КВ по цепи:

КВ своими контактами: подключило 3 фазы обмотки статора ЭД; разомкнуло цепь КД; подключило КТ и РД. РД размыкает цепь КД. КТ, получив питание, проводит механическое растормаживание, запитав катушку тормоза; готовит цепь питания КП.
4. Перевести рукоятку КК в положение “2”.
Получает питание КП по цепи:

КП своими контактами: шунтирует 1-ю ступень пускового реостата и двигатель переходит на 2-ю характеристику; разрывает цепь питания РУ1. РУ1, потеряв питание, замыкает свой контакт с выдержкой во времени на замыкание.
5. Перевести рукоятку КК в положение “3”.
Получает питание КУ1 по цепи:

КУ1 своими контактами: шунтирует 2-ю ступень пускового реостата и двигатель переходит на 3-ю характеристику; разрывает питание РУ2. РУ2, потеряв питание, замыкает свой контакт с выдержкой времени. Далее запитывается КУ2, который своими контактами шунтирует 3-ю ступень пускового реостата и двигатель переходит на естественную характеристику.
Торможение (рукоятка КК переводится на нейтраль, т.е. в положение “0”)
КВ теряет питание и своими контактами: разрывает цепь питания КТ и РД; разрывает 3-фазную цепь питания обмотки статора; разрывает цепь питания КТ и РД; замыкает цепь питания КД. РД, потеряв питание, своим контактом с выдержкой времени на размыкание временно не разрывает питание КД, и он получает питание. КД своими контактами подключает постоянный ток к обмотке статора, проводя динамическое торможение. КТ, потеряв питание, проводит механическое торможение, обесточив своими контактами катушку тормоза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.