








САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
Кафедра: Управление и информатика в технических системах
Факультет: Инженерно-строительный
РАСЧЕТНАЯ РАБОТА
По дисциплине
ЛСУ
СЛЕДЯЩИЕ СИСТЕМЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ (РЛС)
Выполнил: ст. гр. УИТ-52В
Васенин А.В.
Проверил: преподаватель
Стельмах И.В. _________
«__»____________ 2003г.
2003
СОДЕРЖАНИЕ
1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СЛЕДЯЩИЕ СИСТЕМЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ 3
2 ВЫБОР ЭЛЕМЕНТОВ И НАХОЖДЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ СИСТЕМЫ 5
3. ПОСТРОЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА 9
4 ВКЛЮЧЕНИЕ В СИСТЕМУ МИКРОПРОЦЕССОРА 11
СПИСОК ЛИТЕРАТУРЫ 14
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СЛЕДЯЩИЕ СИСТЕМЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ.
Радиолокационная станция предназначена для обнаружения цели и для последующего слежения за нею. В период обнаружения станция работает в режиме поиска, когда ее антенна периодически по определенному закону обегает определенный участок пространства. В этот период осуществляется программное управление положением антенны по заданному закону.
В процессе поиска направленное излучение антенны попадает на поверхность цели, отраженный от цели импульс улавливается радиолокатором и станция переключается с режима поиска на режим автоматического сопровождения цели. В режиме сопровождения следящая система непрерывно изменяет направление оси антенны так, чтобы она была с заданной точностью направлена на цель. При этом определяются угловые координаты цели. Ниже описывается схема станции SCR-584.
Процесс слежения затрудняется целым рядом обстоятельств. Движение цели, которое является управляющим сигналом для следящей системы, невозможно заранее предвидеть. Цель может двигаться равномерно или совершать различные маневры.
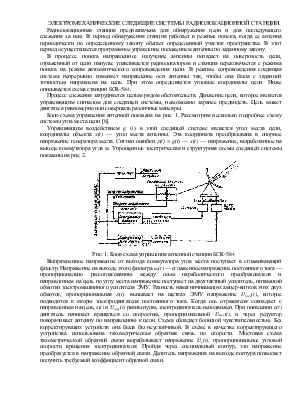
Блок-схема управления антенной показана на рис. 1. Рассмотрим несколько подробнее схему системы угла места цели [8].
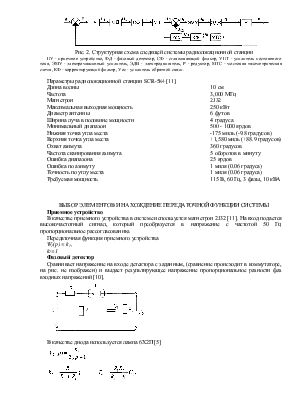
Управляющим воздействием g (t) в этой следящей системе является угол места цели, координаты объекта x(t) — угол места антенны. Эта координата преобразована в опорное напряжение генератора места. Сигнал ошибки e(t) = g(t) — x(t) — напряжение, выработанное на выходе коммутатора угла м. Упрощенные электрическая и структурная схемы следящей системы показаны на рис. 2.
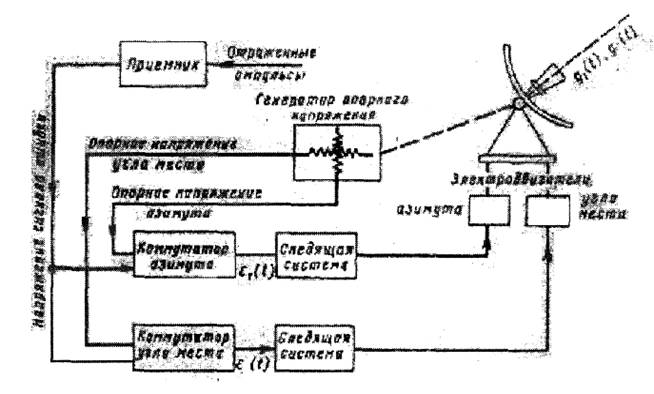
Рис. 1. Блок-схема управления антенной станции SCR-584.
Выпрямленное напряжение от выхода коммутатора угла места поступает в сглаживающий фильтр. Напряжение на выходе этого фильтра ur(t) — сглаженное напряжение постоянного тока — пропорционально рассогласованию между осью параболического преобразователя и направлением на цель по углу места напряжение поступает на двухтактный усилитель, питающий обмотки электромашинного усилителя ЭМУ. Разность намагничивающих ампер-витков этих двух обмоток, пропорциональная e(t), вызывает на щетках ЭМУ напряжение Uэму(t), которое подводится к якорю электродвигателя постоянного тока. Когда ось отражателя совпадает с направлением на цель, s(t) и Uэму(t) равны нулю, электродвигатель неподвижен. При появлении e(t) двигатель начинает вращаться со скоростью, пропорциональной Uэму(t), и через редуктор поворачивает антенну по направлению к цели. Схема обладает большой чувствительностью. Без корректирующих устройств она была бы неустойчивой. В схеме в качестве корректирующего устройства использована тахометрическая обратная связь по скорости. Мостовая схема тахометрической обратной связи вырабатывает напряжение Us(t), пропорциональное угловой скорости вращения электродвигателя. Пройдя через специальный контур, это напряжение преобразуется в напряжение обратной связи. Делитель напряжения на выходе контура позволяет получить требуемый коэффициент обратной связи.

Рис. 2. Структурная схема следящей системы радиолокационной станции
ПУ - приемное устройство, ФД - фазовый детектор, СФ - сглаживающий фильтр, УПТ - усилитель постоянного тока, ЭМУ - электромашинный усилитель, ЭДВ - электродвигатель, Р - редуктор, МТС - мостовая тахометрическая схема, КФ - корректирующий фильтр, Уос - усилитель обратной связи.
Параметры радиолокационной станции SCR-584 [11]
Длина волны 10 см
Частота 3,000 МГц
Магнетрон 2J32
Максимальная выходная мощность 250 кВт
Диаметр антенны 6 футов
Ширина луча в половине мощности 4 градуса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.