МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
ЛАБОРАТОРНАЯ РАБОТА №3
по дисциплине ЛСУ
Исследование системы прямого цифрового управления с датчиком типа ЛИР-20
Выполнил:
ст. гр. УИТ-52
Прахова Т.А.
Проверил:
Комлева О.А. ______
« ___ » _______ 2008г
2008
Данная работа подразделяется на два этапа:
1ЭТАП
Целью работы являются:
1. Изучение принципа действия и условий формирования выходных сигналов унитарно-кодового датчика ЛИР-20.
2. Знакомство с устройствами формирования ШИМ в системе прямого цифрового управления.
3. Определить характеристик исполнительного двигателя в режиме ШИМ.
Исследуемая система прямого цифрового управления включает в себя ПЭВМ со встроенной платой цифрового ввода/вывода ЛА-ТМР, усилитель-преобразователь, исполнительный двигатель, инкрементный датчик угла ЛИР-20, схему формирования сигнала направления вращения двигателя.
ПЭВМ совместима с IBM PC и содержит плату ЛА-ТМР. Плата является частью устройства связи с объектом и выполняет определенные задачи, присущие технологическим контроллерам. Через нее осуществляется обмен информации между ОУ и ЭВМ, и формирует ШИМ-сигнал. Она содержит:
-6 шестнадцатиразрядных счетчиков-таймеров Intel P82C54;
-высокостабильный кварцевый генератор с частотой 10 МГц;
-16 цифровых линий, организованных как 8 входов и 8 выходов;
-линии стробирования;
-2 независимые линии запроса прерывания для IBM PC.
На счетчик-таймер могут быть поданы сигналы с частотой 10 или 1 МГц.
УП является усилителем мощности с гальванической развязкой и обеспечивает преобразованием 2 сигналов сигнал, пропорциональный напряжению и позволяющий осуществлять измерение направления вращения двигателя.
В качестве исполнительного двигателя используется двигатель Д-25Г.
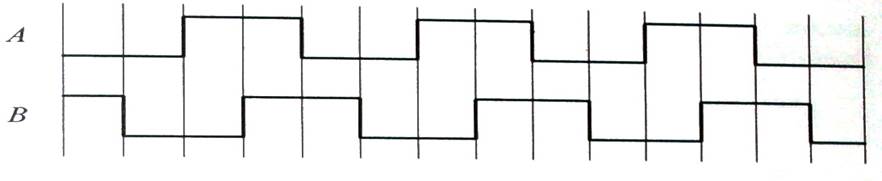
Обратная связь осуществляется с помощью инкрементного датчика угла ЛИР-20. В основе которого лежит принцип фотоэлектрического сканирования штриховых растворов. На рисунке представлены временные диаграммы выходных сигналов датчика. Этот датчик обеспечивает сдвиг фаз между выходными сигналами А и В на четверть шага.
Датчик связан с двигателем через редуктор с передаточным числом i=24.
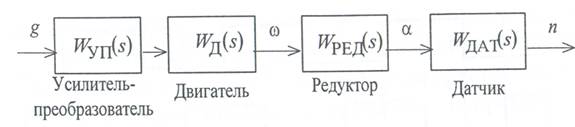
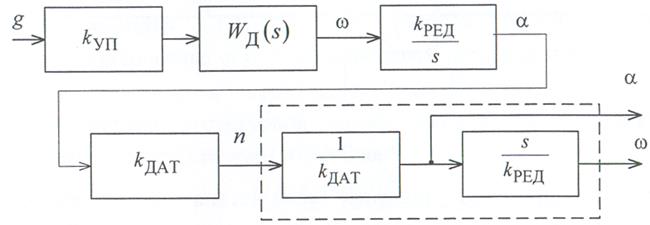
Структурная схема разомкнутой системы.
Учитывая что период дискретизации на несколько порядков меньше длительности переходных процессов в системе и шаг дискретизации достаточно мал (1/1000 оборота или 0,006 рад), можно рассматривать систему управления как непрерывную.
Пологая что постоянные времени усилителя-преобразователя
(ТУП![]() с) и якорная постоянная двигателя
ТЯ
с) и якорная постоянная двигателя
ТЯ![]()
![]() с.
Примем передаточные функции элементов в следующем виде:
с.
Примем передаточные функции элементов в следующем виде:
![]() ;
;
![]() ;
;
 ;
;
Для измерения скорости используется схема, представленная на рисунке. Штриховой линией выделены блоки, реализованные программно.
Т.
о. положение ![]() и скорость
и скорость ![]() можно
вычислить:
можно
вычислить:

где ![]() =6.2 с
=6.2 с
n – количество полученных от датчиков импульсов (24 импульса)
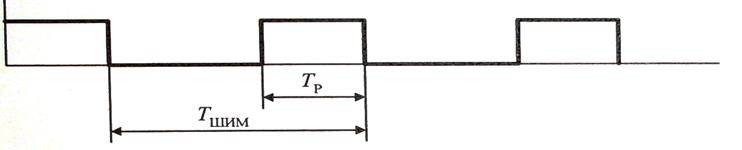
Воздействие задается как отношение ТР/ТШИМ=1.1/2.2=0.5, где ТР - время, в течение которого на выходе ШИМ формируется установлена единица (рабочий период); ТШИМ- период ШИМ.
Отрицательное значение обозначало бы, что вращение идет в обратную сторону.
Значение частоты ШИМ влияет на тепловые потери в якоре двигателя, которые определяются эффективным значением тока якоря. Поэтому при выборе частоты ШИМ для снижения эффективного значения тока необходимо исходить из требуемого соотношения между электрической постоянной времени двигателя и частотой ШИМ, которое должно подчинятся неравенству
С учетом приведенных ПФ элементов структурной схемы ПФ разомкнутой системы имеет вид:

где К= ![]() - коэффициент передачи
разомкнутой системы
- коэффициент передачи
разомкнутой системы
Сняв разгонную характеристику двигателя ![]() ,
учитывая принятую модель его математического представления, можно уточнить ТЭМ
при выбранном значение ШИМ, в соответствии с тем, что:
,
учитывая принятую модель его математического представления, можно уточнить ТЭМ
при выбранном значение ШИМ, в соответствии с тем, что:
![]()
где ![]() - начальная скорость,
- начальная скорость, ![]() - изменение скорости за весь период переходного
процесса. При t=TЭМ:
- изменение скорости за весь период переходного
процесса. При t=TЭМ:
![]()
![]()
Переходный процесс:
Найдя на графике переходного процесса ![]() и
соответствующее ему значение времени t=3.2 , можно
определить электрическую постоянную времени двигателя TЭМ
и
соответствующее ему значение времени t=3.2 , можно
определить электрическую постоянную времени двигателя TЭМ
2 ЭТАП
Целью работы является:
1. Изучение возможных вариантов построения систем прямого цифрового управления с датчиком перемещения ЛИР-20, сравнение вариантов.
2. Расчет регуляторов системы прямого цифрового управления для разных вариантов структурной организации (одно- и двухконтурной систем).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




