






















Техническое задание
Целью данного курсового проекта является развитие и закрепления навыков самостоятельной работы при решении задач анализа и синтеза локальных систем автоматики.
Задание на курсовой проект: спроектировать систему автоматического программного управления расходом сыпучего материала со следующими характеристиками:
– тип регулирования – изменение скорости транспортной ленты;
– скорость движения ленты: 0 – 1,25 м/с;
– максимальный расход сыпучего материала: 150 м3/час;
– перерегулирование s=30 %;
– колебательность М=1.3.
– время регулирования tp=5 c.
1 Описание функциональной схемы
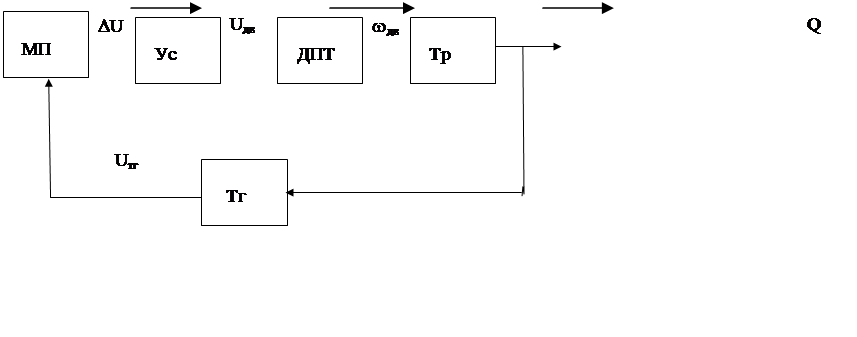 |
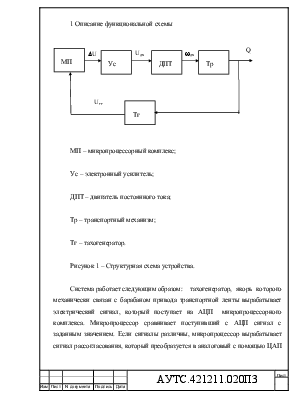
МП – микропроцессорный комплекс;
Ус – электронный усилитель;
ДПТ – двигатель постоянного тока;
Тр – транспортный механизм;
Тг – тахогенератор.
Рисунок 1 – Структурная схема устройства.
Система работает следующим образом: тахогенератор, якорь которого механически связан с барабаном привода транспортной ленты вырабатывает электрический сигнал, который поступает на АЦП микропроцессорного комплекса. Микропроцессор сравнивает поступивший с АЦП сигнал с заданным значением. Если сигналы различны, микропроцессор вырабатывает сигнал рассогласования, который преобразуется в аналоговый с помощью ЦАП и поступает на электронный усилитель. Усилитель управляет напряжением питания электродвигателя с помощью системы импульсно–фазового управления (СИФУ). Двигатель приводит в движение транспортную ленту транспортира через редуктор. Транспортная лента транспортира захватывает сыпучий материал, который высыпается из бункера под действием силы тяжести. Расход сыпучего материала пропорционален скорости движения ленты.
2 Выбор элементов схемы
2.1 Выбор двигателя
Из условия обеспечения необходимой мощности и снижения массогабаритных параметров выбран двигатель серии 2П 2ПФ 250 МУХЛ4 со следующими характеристиками:
– мощность Р=30 кВт;
– напряжение питания Uпит=220 В;
– сопротивления якоря двигателя Ra=0.074 Ом;
– номинальный крутящий момент Мном=143,5 Н*м
– момент инерции якоря Jдв=1.02 кг*м2;
– максимальная частота вращения якоря nmax =2000 об/мин;
– номинальная частота вращения якоря nном =1500 об/мин;
– КПД 81%
– номинальный ток якоря Iа =163 А
2.2 Выбор усилителя
Так как мощность двигателя 30 кВт, который работает от сети постоянного тока напряжением 220 В, выбран тиристорный усилитель с системой импульсно фазового управления (СИФУ) БУ3609 который обеспечивает мощность с учетом запаса 60 кВт и регулирование скорости вращения 0–2000 об/мин.
2.3 Выбор микропроцессора
Выбран микропроцессорный комплекс, построенный на базе 16 разрядного микропроцессора КР1810БМ86. В состав комплекса входят ЦАП и АЦП.
Характеристики комплекса:
– напряжение питания: 5В;
– быстродействие 2,5 млн оп/с;
Характеристики ЦАП и АЦП даны в таблице 1.
Таблица 1 – Характеристики ЦАП и АЦП.
|
Тип микросхемы |
Разрядность |
tуст, мкс |
dл % |
Uоп, В |
Uпит, В |
|
|
АЦП |
К572ПА2А |
12 |
15 |
0,1 |
±15 |
+5;+15 |
|
ЦАП |
К572ПВ1В |
12 |
170 |
0,2 |
±15 |
+5;+15 |
Такой комплекс обладает достаточным быстродействием для управления системой, малой стоимостью и малой потребляемой электроэнергией.
2.4 Выбор транспортного механизма
В качестве транспортного механизма выбран транспортир со следующими характеристиками:
– фактический расход : 150 м3/час;
– максимальная скорость барабана nтр=47,7 об/мин;
– требуемая мощность двигателя Ртр при максимальном расходе сыпучего материала и при оборотах двигателя n=1500 об/мин – 24,7 кВт;
– приведенный к валу двигателя момент инерции Jнаг пр= 1,25 кг*м2;
– момент статического сопротивления Мнагр=2429 Н*м;
– транспортир снабжен редуктором с передаточным числом i=30.
2.5 Выбор датчика
Выбран тахогенератор ПТ–42 со следующими характеристиками:
номинальные обороты якоря тахогенератора nном тг=100 об/мин;
– напряжение тахогенератора Uтг=230 В;
– ток якоря Iа тг=0,1А;
– напряжение возбуждения статора Uвозб=55 В.
3 Определение передаточных функций элементов схемы и построение структурной схемы
Системы автоматического управления описываются структурными схемами, состоящими из звеньев и линий связи, которые отражают преобразования сигналов, циркулирующих в системе. Чтобы определить передаточную функцию всей системы необходимо знать передаточные функции всех звеньев данной системы.
3.1 Определение передаточной функции электродвигателя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.