 (39)
(39)
Так как Аmax=А0 M=1.
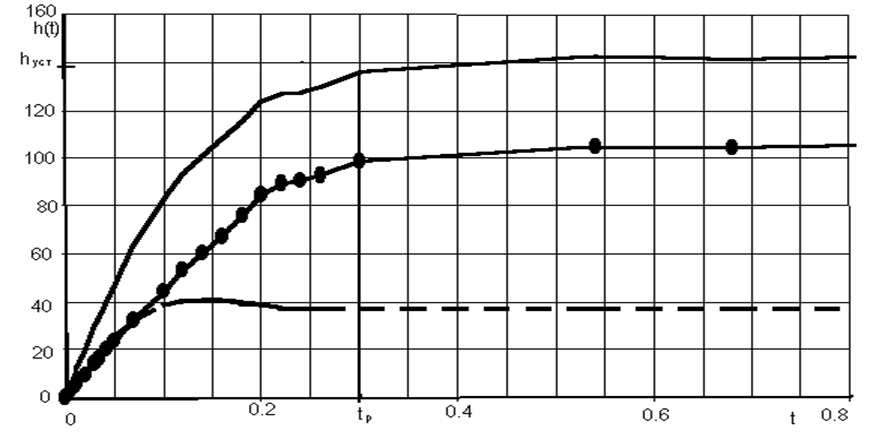
Рисунок 7 – Переходный процесс и его составляющие.
6.2 Построение желаемой ЛАЧХ
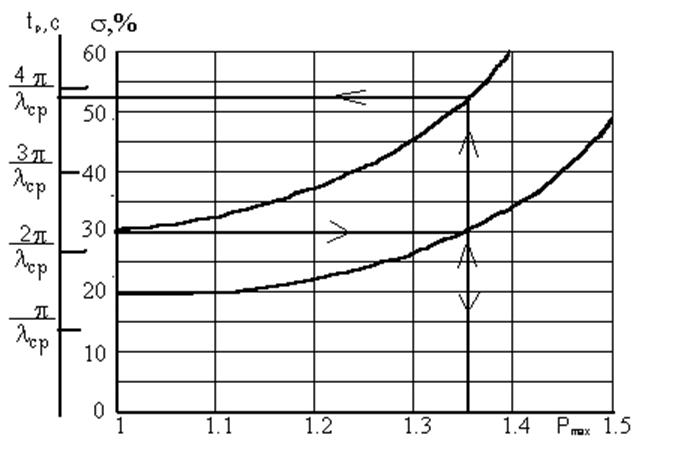
Рисунок 8 – Определение пссевдочастоты среза по номограмме Солодовникова.
По номограмме Солодовникова показанной на рисунке 7 определена псевдочастота среза для перерегулирования заданного в техническом задании.
lср=3,5p/tр=3,5p/0.25=44 рад/с (40)
Определены псевдочастоты сопряжения:
lС1= 4*lср=178 рад/с lС2=lср2/lС1=10,87 рад/с (41)
Среднечастотная асимптота желаемой ЛАЧХ проводится через точку lср с наклоном минус 20 дБ/дек до псевдочастот lС1 и lС2.
Высокочастотная асимптота мало влияет на характеристики системы, ее строим таким образом, чтобы корректирующее устройство было максимально простым.
Низкочастотную асимптоту проводим под наклоном 20 дБ/дек, так как данной системе не требуется высокое быстродействие.
6.3 Определение запасов устойчивости
Определяем запасы устойчивости по фазе и амплитуде по желаемой ЛАЧХ и ФЧХ.
ФЧХ не пересекает значения , поэтому запас устойчивости по амплитуде стремится к бесконечности. Запас устойчивости по фазе – превышение фазы над значением минус p.
Hм=¥; g=82.9 (42)
6.4 Синтез программы коррекции
Находим передаточную функцию корректирующего устройства:
 (43)
(43)
 (44)
(44)
Подставляя в выражение 43 получим:
 (45)
(45)
Приведем к стандартному виду разделив на 17807,251:
 (46)
(46)
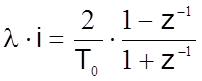
По формуле (46) найдем разносное уравнение в реальном масштабе времени, то есть введя в числитель дополнительный сдвиг z–1. В результате получим:
![]()
![]() (47)
(47)
Реализуем программу коррекции для микропроцессорного комплекса:
;---------korrekt.asm----------------------
.data ; сегмент данных
tabl dw 0 ; заданное значение расхода
vin dw 0 ; управляющий сигнал
vout dw 0 ; текущее значение расхода
sost dw 0 ;регистр состояния устанавливается в 1, если пришел ;сигнал квантования Т0.
U dw 0,0,0,0,0
C dw 47, –1020, 5540, –8379, –18380
r dw 0, 0, 0, 0, 0
.code ;начало сегмента кода
proc main ;начало процедуры main
lp1: mov ax, sost ;запись заданного значения в регистр ax
sub ax, 1
jnz lp1 ; вычислять, если sost=1
mov ax, vin ; чтение текущего значения
mov [u+2], ax
xor bx, bx
mov [r+0], bx ;очистка
mov [r+1], bx ;очистка
l2: mov cx, [r+1]
mov [r+2], cx
mov ax, [c+cx]
mov [r+4], ax
mul cx
mov[r+4], ax
mov dx, [r+3]
mov ax, [r+0]
add dx, ax
mov [r+3], dx
cmp cx,12
jne l2
mov vin, ax ; вывод результата
mov bx, [u+0]
mov [u+1], bx
mov [r+1], ax
mov cx, [u+5]
mov [u+3], cx
mov [u+2], cx
xor ax, ax ; очистка
mov sost, ax ; сброс регистра состояния
jmp lp1 ;зацикливание
endp main ;конец процедуры main
code ends ;конец сегмента кода
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.