end main ;конец программы с точкой входа main
6.5 Синтез последовательного корректирующего устройства
По ЛАЧХ корректирующего устройства находим само корректирующее устройство:
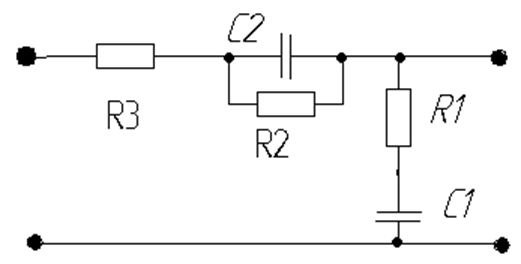
Рисунок 9 – Корректирующее устройство.
Зная
значения Т1, Т2, ![]() находим
значения сопротивлений и емкостей последовательного корректирующего устройства.
находим
значения сопротивлений и емкостей последовательного корректирующего устройства.
 (48)
(48)
 ; T1=R1C1; T2=R2C2 (49)
; T1=R1C1; T2=R2C2 (49)
Задаваясь значением сопротивлений R1=100кОм из формул 42–43, получим R3=2,02Мом, С1=1,4 мкФ, R2=1,69МОм; С2=0,00014 мкФ.
Так как микропроцессор является сравнивающим устройством, записываем программу сравнения.
;---------sravnen.asm----------------------
.data ; сегмент данных
tabl dw 0 ; заданное значение расхода
vin dw 0 ; текущее значение расхода
vout dw 0 ; текущее значение расхода
sost dw 0 ;регистр состояния устанавливается в 1, если пришел ;сигнал квантования Т0.
.code ;начало сегмента кода
proc main ;начало процедуры main
lp1: mov ax, sost ;запись регистр состояния в регистр ax
sbb ax, 1
jnz lp1 ; вычислять если sost=1
mov bx, vin ;запись текущего значения в регистр bx
sub ax, bx ;вычисление разности
mov vout, ax ;запись текущего значения в выходную ячейку
xor ax, ax ; очистка
mov sost, ax ; сброс регистра sost
jmp lp1 ; зацикливание программы
endp main ;конец процедуры main
code ends ;конец сегмента кода
end main ;конец программы с точкой входа main
7 Выбор места установки корректирующего устройства
Место установки корректирующего устройства важно отражается на характеристиках системы. Обычно последовательное корректирующее устройство ставится до или после усилителя. В данном случае корректирующее устройство ставится перед усилителем, так как оно потребляет часть мощности сигнала, и если его ставить после усилителя потребуется значительное увеличение мощности усилителя и мощности теплового рассеяния элементов корректирующего устройства. К тому же выходной сигнал ЦАП доходит до 15 В и после прохождения через корректирующее устройство его уровень будет значительно больше уровня наводимых помех.
Применение параллельных корректирующих устройств нецелесообразно, так как в них используются интегрирующие звенья – тахогенераторы, что усложняет и удорожает систему.
Программная коррекция является наиболее простой, но любое цифровое
устройство обрабатывает непрерывный сигнал только с заданной степенью точности,
увеличение точности приведет к необходимости использования быстродействующих
микропроцессорных комплексов.
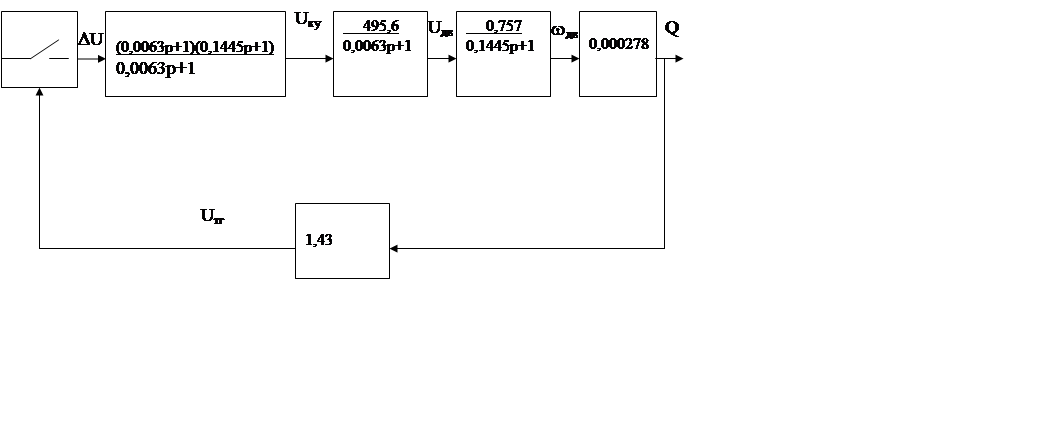
Рисунок 10 – Структурная схема скорректированного регулятора.
Заключение
Спроектированная система полностью удовлетворяет требованиям технического задания: перерегулирование составило 4,98%, колебательность М=1 и временем регулирования tp=0,25 c.
Список литературы
1. Майко Г. В. Ассемблер для IBM PC: – Mосква: “Бизнес – Информ”,”Сирин ” 1997 г
2. Топчеев Ю. И. Атлас для проектирования систем автоматического регулирования.–Москва, Машиностроение. 1989.
3. Опадчий Ю. Ф. Аналоговая и цифровая электроника.– Москва. 1999
4. Тотельбаум И. М. Практика аналогового моделирования динамических систем.–Москва. 1978.
5. Егоров К. В. Теория автоматического управления: М, Энергия
6. Персональные ЭВМ и микроЭВМ. Основы организации. Справочник/ Под ред. А. А. Мячева. – М.: Радио и связь, 1991
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.