При роботі токарних станків деталі, які підлягають обробці крутяться навколо своєї вісі, радіолокатор веде огляд простору також обертаючись навколо своєї вісі і визначає координати об’єкта не в прямокутній системі координат, а в криволінійній. При дослідженні руху рідини в циліндричних трубах або руху повітряних мас в колоземному шарі атмосфери використовувати прямокутну систему нераціонально. Декартова система координат не завжди зручна. Через те поряд з декартовою застосовують інші ортогональні системи координат, найпоширенішими серед яких є циліндрична та сферична.
Система координат називається ортогональною, якщо в кожній точці простору координатні поверхні попарно перпендикулярні.
|
|
Координатними
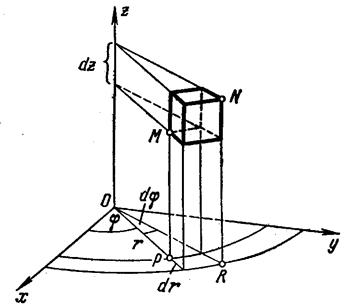
поверхнями циліндричної системи є циліндр ![]() і площини
і площини ![]() , тобто
вона є ніби поєднанням полярної системи на площині хОу та декартової в напрямі
осі Оz. Циліндрична й
декартова системи зв'язані з формулами
, тобто
вона є ніби поєднанням полярної системи на площині хОу та декартової в напрямі
осі Оz. Циліндрична й
декартова системи зв'язані з формулами ![]() .
.
При заміні змінних в
потрійному інтегралі і переході до циліндричної системи координат елементарний
об’єм ![]() можна розглядати (рис.5.2) як
можна розглядати (рис.5.2) як ![]()
![]() , але ж ми знаємо
, але ж ми знаємо
Рис.5.2
що при переході до полярної системи ![]()
![]() ,
а тому формула заміни прямокутних декартових координат на циліндричні в
потрійному інтегралі має вид
,
а тому формула заміни прямокутних декартових координат на циліндричні в
потрійному інтегралі має вид
 (5.10)
(5.10)
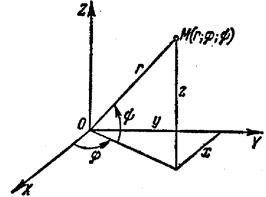
Однозначно визначити положення точки М в трьохвимірному просторі можна, задаючи й інші три характеристики його положення, наприклад: віддаль від початку координат О до точки М і які не-будь два кути між напрямком з фіксованими вісями і напрямком радіус-вектора ОМ. Так вводиться сферична система координат.
а) б)
Рис.5.3
На
рис.5.3 а) прямокутні декартові координати замінюються на віддаль r від початку координат О до точки М,
кут ![]() між напрямком ОМ і площиною ХОУ,
кут
між напрямком ОМ і площиною ХОУ,
кут ![]() між віссю ОХ і проекцією відрізка ОМ на
площину ХОУ. Зв’язок між координатами систем такий:
між віссю ОХ і проекцією відрізка ОМ на
площину ХОУ. Зв’язок між координатами систем такий: ![]() . (5.11)
. (5.11)
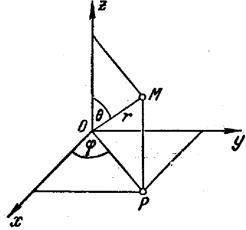
На практиці і в
науковій літературі зустрічається система координат (рис.5.3 б)) в якій
за координату береться кут між ОМ і віссю ОZ. Зв’язок між координатами систем прямокутної і сферичної такий: ![]() . (5.12)
. (5.12)
Ми будемо вважати
відмінності між (5.11) і (5.!2) не принциповими бо замінивши в (5.12) ![]() прийдемо до (5.11).
прийдемо до (5.11).
Обчислимо якобіан переходу від прямокутної системи до сферичної в формі (5.12).
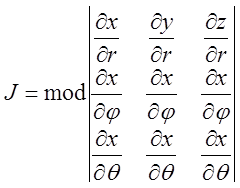 =
=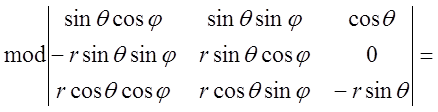
![]() (5.13)
(5.13)
Для заміни по
формулах (5.11) якобіан одержимо з (5.13), поклавши ![]() .
.
![]() (5.14)
(5.14)
Таким чином, формула заміни змінних для сферичних координат має вид:
При ![]()
 (5.15)
(5.15)
При ![]()
 (5.16)
(5.16)
Як приклад застосування криволінійних координат у просторі розвяжемо задачу з збірника задач з математичного аналізу для ВТУЗів під ред Демідовича Б.П. № 2249.
Обчислити:
Розвязок. Побудуємо область. Вона має вид зображений на рис.
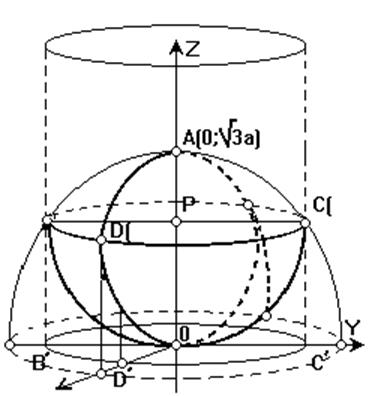 Сфера з параболоїдом перетинаються по колу BDC.
Сфера з параболоїдом перетинаються по колу BDC.
Його проекція на площину ХОУ буде коло ![]() . Знайдемо його рівняння. Центр кола лежить
на початку координат, а тому рівняння матиме вид
. Знайдемо його рівняння. Центр кола лежить
на початку координат, а тому рівняння матиме вид ![]() , де r радіус, який
треба знайти. Це зробимо так: Точка С є точка перетину трьох поверхонь –
параболоїда, сфери і площини х=0, а значить її координати є розв’язком системи
, де r радіус, який
треба знайти. Це зробимо так: Точка С є точка перетину трьох поверхонь –
параболоїда, сфери і площини х=0, а значить її координати є розв’язком системи 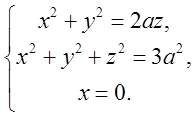
Розв’язком цієї системи
є дві точки ![]()
![]() . Перший набір це
координати точки В. Другий – координати точки С. Координати точки
. Перший набір це
координати точки В. Другий – координати точки С. Координати точки ![]() будуть:
будуть: ![]()
Але ж ![]() , тому рівняння кола
буде
, тому рівняння кола
буде ![]() . Виходячи з виду області інтегрування
бачимо, що обчислення будуть раціональніші, якщо ми перейдемо до циліндричної
або сферичної системи координат. Яку ж вибрати?. При переході до сферичної с/к
інтеграл прийдеться розбивати на два бо верхня границя по r вздовж
кола BDC при зміні
. Виходячи з виду області інтегрування
бачимо, що обчислення будуть раціональніші, якщо ми перейдемо до циліндричної
або сферичної системи координат. Яку ж вибрати?. При переході до сферичної с/к
інтеграл прийдеться розбивати на два бо верхня границя по r вздовж
кола BDC при зміні ![]() буде переходити з поверхні параболоїда на
поверхню сфери, крім того громіздким буде вираз під внутрішнім інтегралом. А
тому перейдемо до циліндричної с/к.
буде переходити з поверхні параболоїда на
поверхню сфери, крім того громіздким буде вираз під внутрішнім інтегралом. А
тому перейдемо до циліндричної с/к. ![]() Границі інтегрування по
Границі інтегрування по
![]() і по
і по ![]() –
очевидні:
–
очевидні:
![]() . Z змінюється від рівняння параболоїда до
рівняння сфери, які ми зараз переведемо в циліндричну с/к.
. Z змінюється від рівняння параболоїда до
рівняння сфери, які ми зараз переведемо в циліндричну с/к.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.