|
Номер варианта |
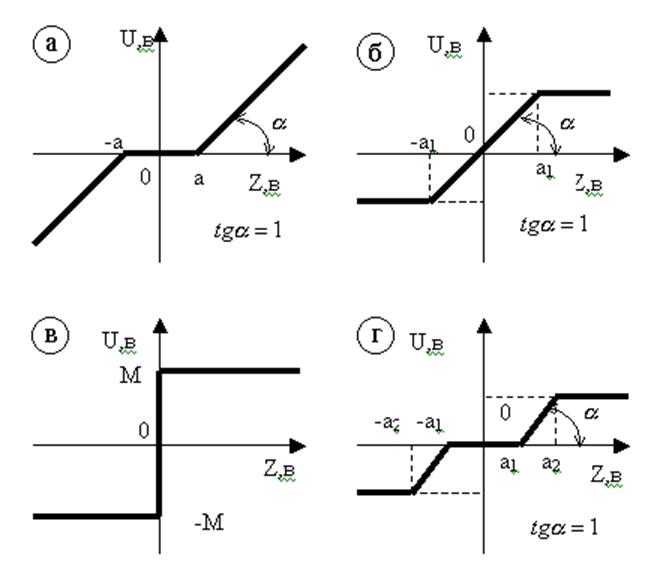
Тип нелинейности |
Нелинейный элемент |
Линейная часть |
W3(p) |
|||||||||
|
а |
а1 |
а2 |
М |
К1 |
Т1 |
К2 |
Т2 |
К3 |
Т3 |
Т4 |
|||
|
1. |
а |
5 |
10 |
0,1 |
10 |
0,5 |
3 |
1 |
0,1 |
|
|||
|
2. |
б |
20 |
50 |
0,02 |
10 |
0,1 |
16 |
0,2 |
0,02 |
||||
|
3. |
в |
10 |
25 |
0,04 |
10 |
0,2 |
8 |
0,4 |
0,04 |
||||
|
4. |
г |
5 |
10 |
20 |
0,05 |
10 |
0,25 |
7 |
0,5 |
0,05 |
|||
|
5. |
г |
5 |
15 |
17 |
0,06 |
10 |
0,3 |
5 |
0,6 |
0,06 |
|||
|
6. |
в |
20 |
12 |
0,08 |
10 |
0,4 |
4 |
0.8 |
0,08 |
||||
|
7. |
б |
10 |
7 |
0,15 |
10 |
0,75 |
2,2 |
1,5 |
0,15 |
||||
|
8. |
а |
10 |
5 |
0.2 |
10 |
1 |
1,6 |
2 |
0,2 |
||||
|
9. |
а |
15 |
4 |
0,25 |
10 |
1,2 |
1,3 |
2,5 |
0,25 |
||||
|
10. |
б |
30 |
3 |
0,3 |
10 |
1,5 |
1 |
3 |
0,3 |
||||
|
11. |
в |
30 |
0,5 |
0,4 |
10 |
2 |
0,8 |
4 |
0,4 |
|
|||
|
12. |
г |
5 |
25 |
2 |
0,5 |
10 |
2 |
0,6 |
5 |
0,5 |
|||
|
13. |
г |
3 |
15 |
10 |
0,1 |
10 |
0,5 |
13 |
2 |
0,1 |
|||
|
14. |
в |
10 |
50 |
0,02 |
10 |
0,1 |
70 |
0,4 |
0,02 |
||||
|
15. |
б |
10 |
25 |
0,04 |
10 |
0.2 |
30 |
0,8 |
0,04 |
||||
|
16. |
а |
15 |
20 |
0,05 |
10 |
0,2 |
30 |
0,1 |
0,05 |
||||
|
17. |
а |
5 |
16 |
0,06 |
10 |
0,3 |
22 |
1,2 |
0,06 |
||||
|
18. |
б |
20 |
12 |
0,08 |
10 |
0,4 |
17 |
1,6 |
0,08 |
||||
Таблица 8.
|
Включение нелинейности |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
I |
II |
III |
IV |
IV |
III |
II |
I |
IV |
III |
II |
|
|
Включение нелинейности |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
|
I |
I |
II |
III |
IV |
IV |
III |
II |
I |
I |
II |
Тип нелинейностей.
Составитель
Анатолий Иванович Рыбаков
ТЕОРИЯ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Программа, методические указания и контрольные задания.
Специальность “Электропривод и автоматика
промышленных установок и технологических комплексов” (180400)
Утверждена на заседании кафедры автоматизированного
электропривода и промышленной электроники
г, протокол № , и одобрена
редакционной комиссией факультета
Редактор Н.П. Лавренюк
Подписано в печать , Формат бумаги
Усл. печ. л. Уч.-изд.л. Тираж экз. Заказ
__________________________________________________________
Сибирский Государственный Индустриальный Университет, 654080, Новокузнецк, ул. Кирова 42.
Издательский центр СибГИУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.