Гирокомпас “Яхта” построен на базе динамически настраиваемого гироскопа (ДНГ) и имеет высокую степень автоматизации процессов, связанных с его включением и обнаружением неисправностей. Он практически не требует проведения в судовых условиях никаких профилактических работ, кроме общего наблюдения за его техническим состоянием. Функции встроенной системы диагностики сводятся только к определению наличия какой-либо неисправности в основных системах компаса и отключению неисправного прибора. Информация о характере неисправности и месте ее локализации отсутствует. Как правило, отсутствует и ЗИП на прибор. Все это делает практически невозможным проведение ремонтных работ в судовых условиях.
Учитывая сказанное, содержание дипломной работы имеет своей целью познакомить [А.И.1] с техническими данными изделия, его общей функциональной схемой, составом блока электроники, назначением и функциональными схемами его основных плат. Наряду с этим диплом ознакомит анализом работы ГК при различных условиях плавания, исследуя процессы установления гироскопа в меридиан при различных начальных углах его рассогласования. [А.И.2]
1. Общая характеристика гирокомпаса
1.1 Назначение и технические характеристики гирокомпаса[А.И.3]
Гирокомпас предназначен для курсоуказания на морских и речных судах, а также яхтах.
Прибор рассчитан на эксплуатацию в следующих условиях:
- температура окружающей среды должна находиться в пределах от -100С до +550С (для пеленгаторных репитеров, пелорусов и оптического пеленгатора от -400С до +650С);
- угловая скорость рысканья судна не должна превышать 10 град./с;
- максимальное значение горизонтальной составляющей ускорения качки судна не должно быть более 1 м/c;
- допустимая линейная скорость судна составляет 60 узлов;
- максимальная широта плавания 750.
Основные технические параметры прибора соответствуют следующим данным:
- Статическая погрешность измерения курса судна в широтах до 600 не превышает 0,20 sec j.
- Динамическая погрешность судна в тех же условиях составляет 0,60 sec j.
- Погрешность передачи курсовой информации от центрального прибора не превышает:
к цифровым приемникам - 0,10;
к аналоговым приемникам - 0,50;
- Время готовности ГК с погрешностью не более 10 при произвольной ориентации диаметральной плоскости судна не превышает 60 мин. В сложных условиях (качка, влияние температуры) время готовности может возрасти до 1,5 часов.
- Питание гирокомпаса осуществляется:
от сети постоянного тока 24 ± 2,4 В. При этом потребляемая мощность составляет не более 30 Вт в установившемся режиме и не более 75 Вт в режиме запуска;
от сети переменного тока напряжения 110/220 В частотой 50/60 Гц.
1.2 Структурная схема и особенности устройства данного ГК
Гирокомпас “Яхта” может выпускаться в трех основных комплектациях:
- базовая, для малых судов, не требующих дистанционной передачи данных курса;
- комплектация для малых судов, обеспечивающая передачу данных курса на один аналоговый и один цифровой репитеры;
-комплектация для любых судов, обеспечивающая передачу данных курса на ряд аналоговых и цифровых репитеров.
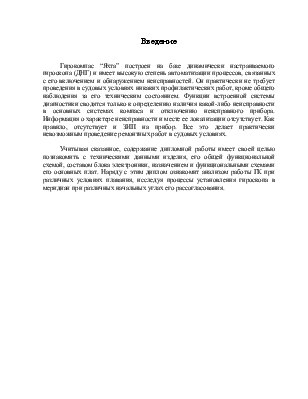
Базовая модель включает в себя (рис.1):
- центральный прибор ГК-1;
- аналого-цифровой вычислитель ВАЦ-3;
- пульт оператора (прибор УК-1Д);
- соединительные кабели 5.
Центральный пробор содержит гироблок с системой его подвеса, датчик курса и исполнительные элементы систем коррекции. В верхней части прибора имеется курсовая шкала 1.
В приборе ВАЦ-3 расположены электронные блоки системы коррекции гироскопа, а также преобразователи его сигналов.
Пульт оператора имеет органы 2 управления работой курсоуказателя, цифровой дисплей 3 и две сигнальные лампочки 4.
Соединение блоков между собой и подключение прибора к бортовой сети осуществляется с помощью кабелей 5, снабженных штепсельными разъемами.
Размещение приборов комплекта на судне производится в соответствии со следующими правилами.
Приборы ГК-1 и ВАЦ-3 должны быть установлены в сухом служебном помещении на расстоянии не более 1 м друг от друга. Желательно, чтобы в помещении не было воздушных потоков с резкими колебаниями температуры, а расстояние от дверей и иллюминаторов, выходящих на открытую палубу, было более 1 м.
 Прибор ГК-1 рекомендуется располагать возможно ближе к
центру масс судна, чтобы отклонения не превышали по вертикальной оси ± 10 м, по поперечной оси ± 5 м, по продольной
оси ± 80 м. Он должен быть установлен без внешних
амортизаторов на жестком металлическом фундаменте, закрепленном на палубе. Фундамент
должен иметь паспортизированную линию, нанесенную гравированием, параллельную
диаметральной плоскости судна с погрешностью не более ± 0, 250. С этой линией должны быть совмещены риски,
нанесенные на основании прибора ГК-1, с погрешностью не более ± 0,250.
Прибор ГК-1 рекомендуется располагать возможно ближе к
центру масс судна, чтобы отклонения не превышали по вертикальной оси ± 10 м, по поперечной оси ± 5 м, по продольной
оси ± 80 м. Он должен быть установлен без внешних
амортизаторов на жестком металлическом фундаменте, закрепленном на палубе. Фундамент
должен иметь паспортизированную линию, нанесенную гравированием, параллельную
диаметральной плоскости судна с погрешностью не более ± 0, 250. С этой линией должны быть совмещены риски,
нанесенные на основании прибора ГК-1, с погрешностью не более ± 0,250.
Соединители прибора ГК-1 должны быть обращены к носу судна. С этой стороны и сверху к прибору должны быть обеспечен свободный доступ не менее 0,5 м, с остальных сторон - не менее 0,2 м.
Помещение в котором установлены приборы ГК-1 и ВАЦ-3 должны иметь аварийное освещение и связь с помещением, в котором установлен прибор УК-1Д.
Прибор УК-1Д рекомендуется размещать вблизи рабочего места штурмана. Поворотный кронштейн позволяет укрепить прибор к переборке, подволоку, к поверхности штурманского стола и т. п.
1.2.1 Особенности устройства ДНГ ГК[А.И.4]
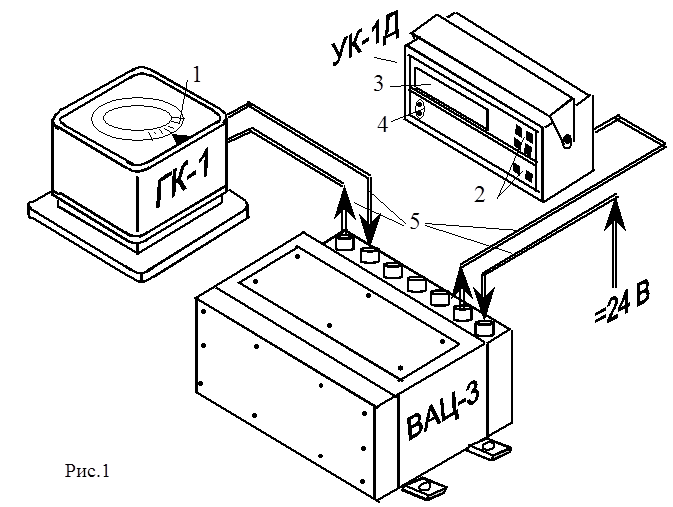
Как это уже было указано выше, гирокомпас “Яхта” построен на базе динамически настраиваемого гироскопа, который представляет собой [1] ротор Р3 (рис. 2), установленный в упругом внутреннем кардановом подвесе. Подвес включает в себя два жестких кольца Р1 и Р2, связанных с ротором с помощью четырех торсионов Т1 – Т4, имеющих высокую жесткость при изгибе и определенную, заранее заданную жесткость при закручивании. Благодаря торсионам ротор может поворачиваться на ограниченные углы вокруг осей оу’ и oz’. Кольца подвеса в нерабочем состоянии располагаются практически в одной плоскости. Ротор совместно с системой его подвеса приводится во вращение с помощью внешнего двигателя (на рис. не показан), связанного с валом, ось которого совпадает с осью ох0. Таким образом, данный гироскоп фактически представляет собой систему трех взаимосвязанных роторов, два из которых Р1 и Р2 имеют неравные главные экваториальные моменты инерции.
 |
1.2.2 Функциональная схема ГК
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.