Существенным источником погрешности гирокомпаса является его технологическое несовершенство. Из-за наличия неравножесткости конструкции, температурных деформаций деталей гироскопа, люфтов и т. п. при маневрировании и качке судна на ротор действуют моменты сил инерции, порождающие его дрейф. Дрейф может также возникать и из-за наличия нутационных колебаний. Значение угловой скорости дрейфа определяется при работе прибора в режиме гироазимута. В режиме гирокомпаса, указанные факторы не вызывают ошибку, возрастающую во времени, а определяют лишь величину его поправки. Поэтому для стабилизации и минимизации величины поправки осуществляют компенсацию указанных составляющих дрейфа. По сигналам термодатчика ТД, установленного в приборе, блоком КТД компенсации температурного дрейфа вырабатываются напряжения, уменьшающие температурный дрейф wtz, wtх, которые, после суммирования с другими сигналами коррекции, поступают на датчики момента ДМZи ДМУ, соответственно.
Для уменьшения изменения поправки компаса за счет наличия его нутационных колебаний используются сигналы датчиков угла ДУу и ДУz. Преобразователь сигнала ПС, используя указанные данные, вырабатывает напряжение, необходимое для компенсации соответствующего ей дрейфа wHZ, которое после суммирования в сумматоре åУ поступает на датчик момента ДМу.
На этот же датчик поступает сигнал от потенциометра R1, устраняющий составляющую дрейфа wН.3.Z, не зависящую от сил инерции, а также сигнал от потенциометра R2, устраняющий составляющую wZдрейфа, обусловленного влиянием сил инерции. Дрейф wУ, вокруг оси оу, обусловленный влиянием сил инерции, компенсируется по сигналам потенциометра R3.
С
целью ослабления перекрестных связей между каналами коррекции, на датчик
момента ДМZ подаются сигналы  и
и
![]() , пропорциональные синусу угла
поворота ВК вокруг оси ох. Текущие значения углов γ
формируются в преобразователе ПСγ по напряжениям, поступающим
с акселерометра АЕ-W.
, пропорциональные синусу угла
поворота ВК вокруг оси ох. Текущие значения углов γ
формируются в преобразователе ПСγ по напряжениям, поступающим
с акселерометра АЕ-W.
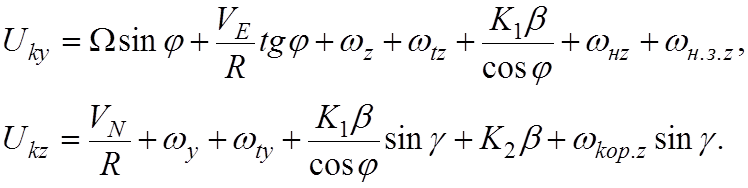
Таким образом, результирующие сигналы коррекции гирокомпаса определяются следующими выражениями [2]:
Информация о курсе судна снимается с датчика курса, который вырабатывает сигналы грубого и точного отсчетов, пропорциональные синусу и косинусу курса. В аналого-цифровом преобразователе АЦП они преобразуется в цифровой код для индикации в указателе курса УК.
В процессе работы прибора осуществляется контроль исправности отдельных систем. Качество работы следящей системы, осуществляющей разгрузку торсионов определяется по уровню сигналов UДУ и UДZ, снимаемых с датчиков угла гироскопа. Превышение этими сигналами определенных уровней свидетельствует о наличии неисправности в указанной системе. Сигнал неисправности поступает в логическое устройство ЛУ типа “ИЛИ” и оттуда на указатель УК. В указателе загорается лампочка “Неисправность” и через 2 секунды ГК отключается. Такая же реакция прибора будет иметь место и при наличии неисправностей в системах преобразования сигналов датчика курса ДК и коррекции гироскопа. Наличие дефектов в системе коррекции определяется по величине угла b отклонения внутреннего кольца ВК от плоскости горизонта. Сигнал неисправности снимается с блока ПСb.
1.3 Состав блока электроники ВАЦ -3
Прибор ВАЦ-3 является аналого-цифровым вычислителем, вырабатывающим корректирующие и управляющие сигналы, а также вторичные напряжения, необходимые для работы гирокомпаса. Кроме этого, он осуществляет преобразование аналоговой информации о курсе судна в цифровой код, используемый потребителями. Практически все электронные функциональные блоки, представленные на рис.2 (лабораторная работа №1), конструктивно сосредоточены в рассматриваемом вычислителе. В него, в частности, входят (рис.3):
1.
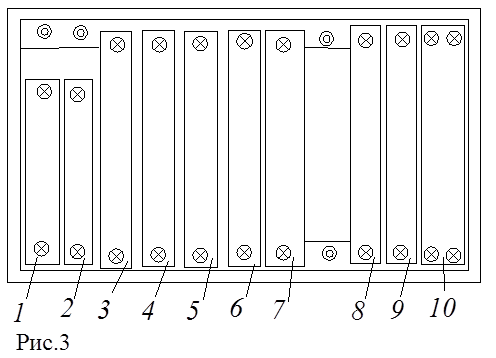 плата ПФ-1фильтров СН-282 ;
плата ПФ-1фильтров СН-282 ;
2. плата ШИМ широтно-импульсной модуляции СН-329;
3. плата ПУ управления СН-028;
4. плата ПК-1 коррекции СН-027;
5. плата ПВ вычислителя СН-018;
6. плата ввода V и φ СН-017;
7. плата ПК преобразователя курса СН-394;
8. плата ПТ таймера СН-023;
9. плата питания гиромотора СН-024;
10. блок питания СН-026;
Конструктивно ВАЦ-3 представляет собой прямоугольный корпус размером 300х320х221 мм, в котором размещены перечисленные электронные платы. Передняя и задняя крышки закрывают доступ к электронным платам с лицевой стороны и к электрическому монтажу прибора, соответственно. Обе крышки крепятся к корпусу с помощью винтов. Электронные кассеты 1-10 изымаются из прибора с помощью рукоятки, размещенной на внутренней стенке передней крышки. В верхней части прибора размещены семь электрических разъемов, предназначенных для подключения внешних кабелей. Прибор крепится к палубе без амортизаторов.
1.3.1 Описание функциональных схем электронных плат
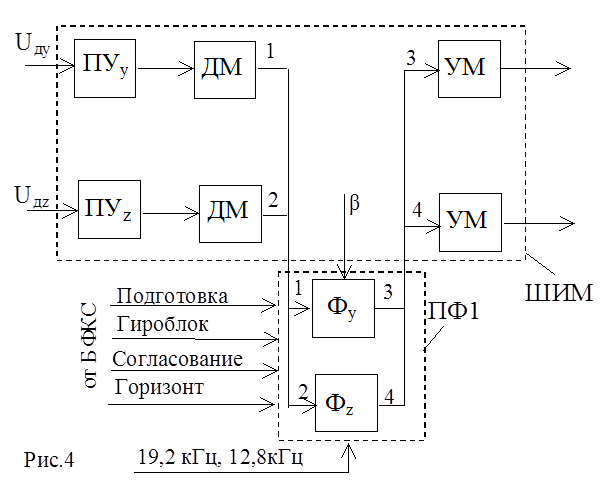
Платы ПФ-1 и ШИМ (рис.4) совместно с датчиками угла ДУУ и ДУZ (рис.2) и двигателями ДСУ и ДСZвыполняют роль двухканальной следящей системы, ограничивающей при повороте основания значения углов закрутки торсионов их допустимыми величинами.
Входные сигналы Uду и Uдz, частотой 19,2 кГц, определяющие углы закрутки торсионов, с датчиков угла поступают на входы предварительных усилителей ПУу и ПУz, расположенных на плате ШИМ широтно-импульсного модулятора. После предварительного усиления и выпрямления демодуляторами ДМ сигналы поступают на плату фильтров ПФ-1 и далее на усилители мощности УМ, расположенные на плате ШИМ и вырабатывающие последовательность импульсов, ширина которых пропорциональна напряжениям, поступившим с фильтров. Таким образом, усилители мощности выполняют также роль широтно-импульсных модуляторов. Промодулированные импульсы поступают на двигатели ДСу и ДСz (рис.2) системы привода карданова подвеса, которые разворачивают его рамки таким образом, чтобы углы закрутки торсионов были практически равны нулю.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.