ДНГ требует высокой точности работы указанных следящих систем. Систематическая ошибка следящей системы в одну угловую секунду приводит к постоянному дрейфу прибора в режиме гироазимута со скоростью 0,020/час.
Кроме рассмотренной функции платы ПФ-1 и ШИМ обеспечивают режим горизонтирования платформы. После включения гирокомпаса до разгона ротора его гироскопа в плате ПФ происходит изменение передаточной функции фильтров в зависимости от величины угла рассогласования β, информация о котором поступает с акселерометра АN-S. В результате устанавливается режим горизонтирования, лучшим образом соответствующий исходному отклонению. Режимы работы рассматриваемого блока определяются командами, поступающими от блока БФКС формирования командных сигналов.
Плата ПУ управления предназначена для:
- формирования управляющих сигналов, подаваемых на датчики моментов ДНГ с целью коррекции пространственной ориентации его главной оси;
- выработки обобщенного сигнала “Неисправность”.
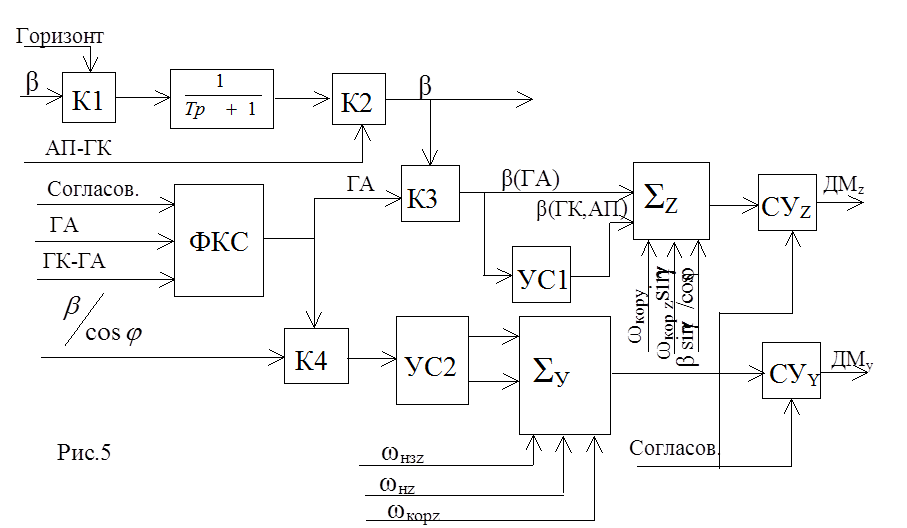
Функциональна схема рассматриваемой платы приведена на рис.5. Формирование управляющих сигналов производится по данным, поступающим на плату от акселерометра АN-S и вычислительных плат гирокомпаса. Сигнал северного акселерометра, соответствующий углу отклонения β, через инерционное апериодическое звено и коммутаторы К1 – К3, а также усилитель УС1 поступает на сумматор Σz, управляющий через согласующее устройство СУz работой датчика ДМz. В свою очередь, на сумматор Σу через коммутатор К4 и усилитель УС2 с блока ПВ поступает сигнал. Сумматор Σу через согласующее устройство СУу управляет работой датчика момента ДМу. В сумматоры подаются и другие сигналы, необходимые для компенсации ошибок прибора.
 |
- “Горизонт.” – горизонтирование главной оси гироскопа;
- “А.П.” – автоматическое приведение гироскопа в меридиан;
- “ГА” – режима гироазимута;
- “ГК” – режима гирокомпаса.
В зависимости от выбранного режима устанавливается масштаб напряжения, определяющего значение угла β. Это производится по соответствующим командам БФКС, формируемым совместно с платой таймера.
Плата вычислителя выполняет операции вычисления величин ,
,  ,
,
![]() и
и .
На модуляторы ДМ (рис.6) с датчика курса, расположенного в приборе ГК-1,
поступает информация, соответствующая значениям
.
На модуляторы ДМ (рис.6) с датчика курса, расположенного в приборе ГК-1,
поступает информация, соответствующая значениям ![]() и
и
![]() . Сюда же поступает опорное
напряжение Uоп частотой 19,2 кГц, которое используется для фазового
детектирования основных сигналов. Постоянные напряжения, пропорциональные sinK
и cosK, поступают в цифро-аналоговые преобразователи ЦАП1 и ЦАП2.
В эти же преобразователи в цифровом виде с платы ввода значений v и φ
поступает информация о скорости судна, а с регистра RGsin – значение синуса широты места судна. Значения sinφ
и cosφ формируются платой ввода v и φ в виде цифрового кода и
предварительно записываются в регистры RGsin и RGcos. ЦАП1 формирует напряжение
постоянного тока, пропорциональное
. Сюда же поступает опорное
напряжение Uоп частотой 19,2 кГц, которое используется для фазового
детектирования основных сигналов. Постоянные напряжения, пропорциональные sinK
и cosK, поступают в цифро-аналоговые преобразователи ЦАП1 и ЦАП2.
В эти же преобразователи в цифровом виде с платы ввода значений v и φ
поступает информация о скорости судна, а с регистра RGsin – значение синуса широты места судна. Значения sinφ
и cosφ формируются платой ввода v и φ в виде цифрового кода и
предварительно записываются в регистры RGsin и RGcos. ЦАП1 формирует напряжение
постоянного тока, пропорциональное .
В свою очередь, ЦАП2 формирует постоянное напряжение, пропорциональное
произведению
.
В свою очередь, ЦАП2 формирует постоянное напряжение, пропорциональное
произведению![]() .
Это напряжение используется для выработки сигнала компенсации угловой скорости
.
Это напряжение используется для выработки сигнала компенсации угловой скорости  , обусловленной явлением сходимости меридианов.
, обусловленной явлением сходимости меридианов.
 |
Сигналы ![]() и
и  вырабатываются преобразователями ЦАП5
и ЦАП6. Для этого с регистров RGsin и RGcos в них вводятся
в цифровом виде значения sinφ и cosφ. Кроме этого в ЦАП с
платы ПУ в аналоговом виде поступает информация о значении угла β.
Эта информация используется блоком ФС2 для формирования сигнала “Неисправность”
при превышении углом β определенного порогового значения.
вырабатываются преобразователями ЦАП5
и ЦАП6. Для этого с регистров RGsin и RGcos в них вводятся
в цифровом виде значения sinφ и cosφ. Кроме этого в ЦАП с
платы ПУ в аналоговом виде поступает информация о значении угла β.
Эта информация используется блоком ФС2 для формирования сигнала “Неисправность”
при превышении углом β определенного порогового значения.
 Плата коррекции (рис.7) формирует напряжения коррекции, пропорциональные
ωкор.z, ωкор.у, ωн.з.z,
βsinγ/cosφ, ωкор.z sinγ, а также напряжение,
компенсирующее дрейф ωнz, порождаемый нутационными
колебаниями. С этой целью с платы ПВ поступают сигналы, пропорциональные
Плата коррекции (рис.7) формирует напряжения коррекции, пропорциональные
ωкор.z, ωкор.у, ωн.з.z,
βsinγ/cosφ, ωкор.z sinγ, а также напряжение,
компенсирующее дрейф ωнz, порождаемый нутационными
колебаниями. С этой целью с платы ПВ поступают сигналы, пропорциональные  ,
, ![]() , и
, и  . С датчиков угла ДУу и ДУz гироскопа после выпрямления в плате ШИМ поступает информация об
амплитудах нутационных колебаний гироскопа, которая используется для выработки
сигнала ωнz , компенсирующего влияние этих колебаний на
работу гирокомпаса. Сигнал компенсации температурного дрейфа ωtox
вырабатывается блоком компенсатора КТД температурного дрейфа с использованием
информации, поступающей с термодатчика, установленного в приборе ГК-1.
. С датчиков угла ДУу и ДУz гироскопа после выпрямления в плате ШИМ поступает информация об
амплитудах нутационных колебаний гироскопа, которая используется для выработки
сигнала ωнz , компенсирующего влияние этих колебаний на
работу гирокомпаса. Сигнал компенсации температурного дрейфа ωtox
вырабатывается блоком компенсатора КТД температурного дрейфа с использованием
информации, поступающей с термодатчика, установленного в приборе ГК-1.
Формирование напряжений, управляющих датчиками моментов гироблока, производится с помощью сумматоров Σ1 и Σ2, построенных на операционных усилителях типа УД-14.
Сигнал, пропорциональный sinγ в начале преобразуется аналого-цифровым преобразователем в цифровую форму, а затем поступает на входы двух цифровых умножителей. На вторые входы умножителей подаются напряжения, соответствующие ωкор.z, и β/cosφ. Выходные сигналы умножителей поступают на плату управления.
Изменение
знака сигнала![]()
 при
изменении знака широты осуществляется коммутатором К по команде,
поступающей с тумблера “φю” – “φc”, установленного в приборе ГК-1.
при
изменении знака широты осуществляется коммутатором К по команде,
поступающей с тумблера “φю” – “φc”, установленного в приборе ГК-1.
С потенциометра R1 снимается сигнал ωн.з.z компенсации составляющей дрейфа гироскопа, не зависящей от ускорения силы тяжести. Постоянные составляющие дрейфа гироскопа устраняются сигналами, снимаемыми с потенциометров R2 и R3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.