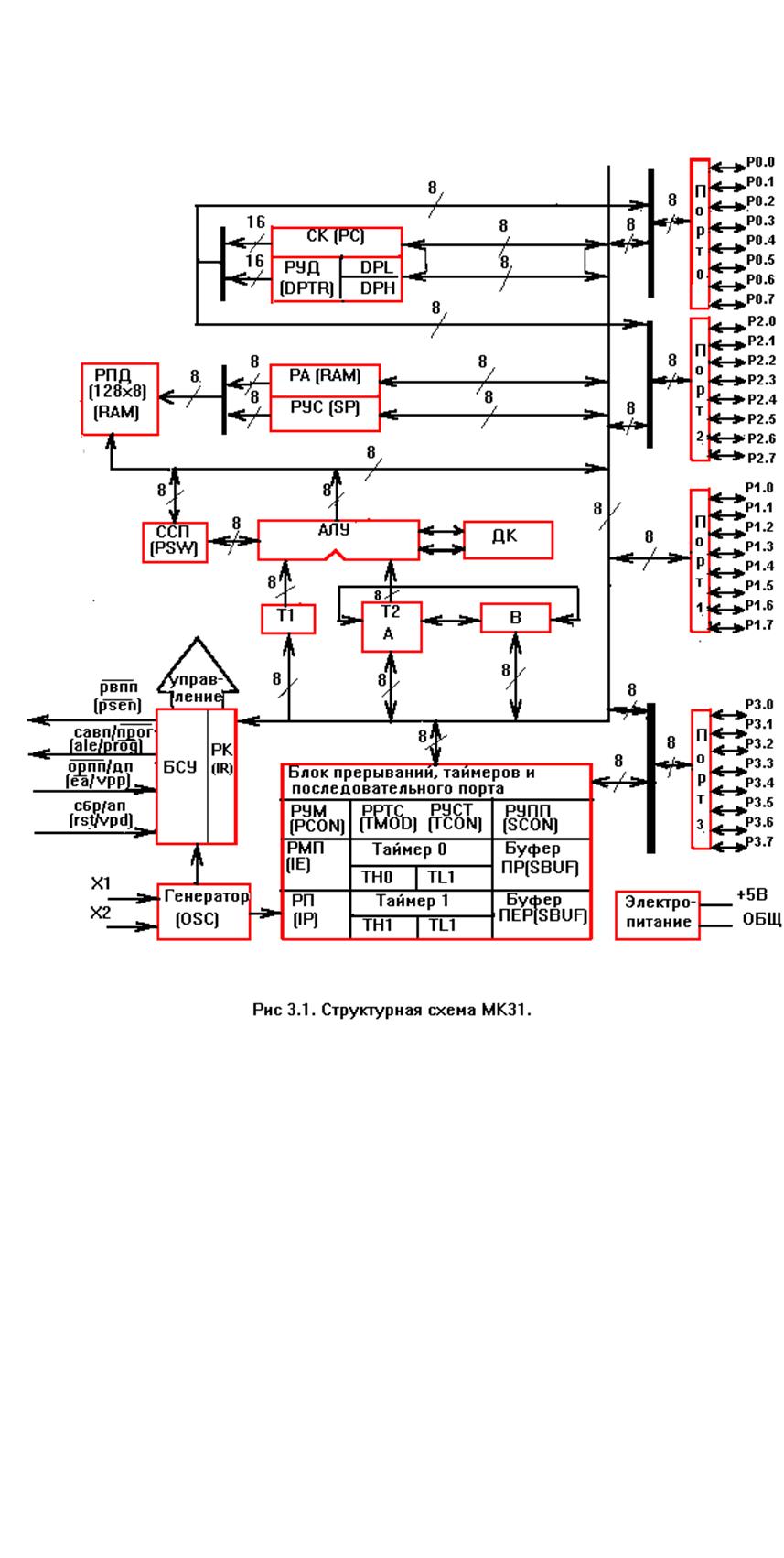
Резидентная память данных предназначена для хранения переменных в процессе выполнения прикладной программы, адресуется одним байтом и имеет емкость 128 байт. Кроме того, к адресному пространству резидентной памяти данных примыкают адреса регистров специальных функций (РСФ). Устройство управления состоит из кварцевого резонатора, подключаемого к внешним выводам Х1 и Х2 корпуса МК31, который управляет работой внутреннего генератора, который, в свою очередь, формирует сигналы синхронизации. Устройство управления МК31 на основе сигналов синхронизации формирует машинный цикл фиксированной длительности, равной 12 периодам резонатора. Машинный цикл содержит шесть состояний S1-S6, каждое из которых по длительности соответствует такту, и, в свою очередь, состоит из двух временных интервалов, определяемых фазами Р1 и Р2 (рис. 22). Длительность фазы равна периоду следования сигнала X, который вырабатывается встроенным тактовым генератором ОМЭВМ.
|
Машинный цикл
¦-----------------------------------------------¦
¦ S1 ¦ S2 ¦ S3 ¦ S4 ¦ S5 ¦ S6 ¦ S1
¦ P1¦P2 ¦ P1¦P2 ¦P1 ¦P2 ¦ P1¦P2 ¦P1 ¦P2 ¦P1 ¦P2 ¦P1 ¦P2 ¦
-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+
X ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦
+-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +-+ +
Рис. 22
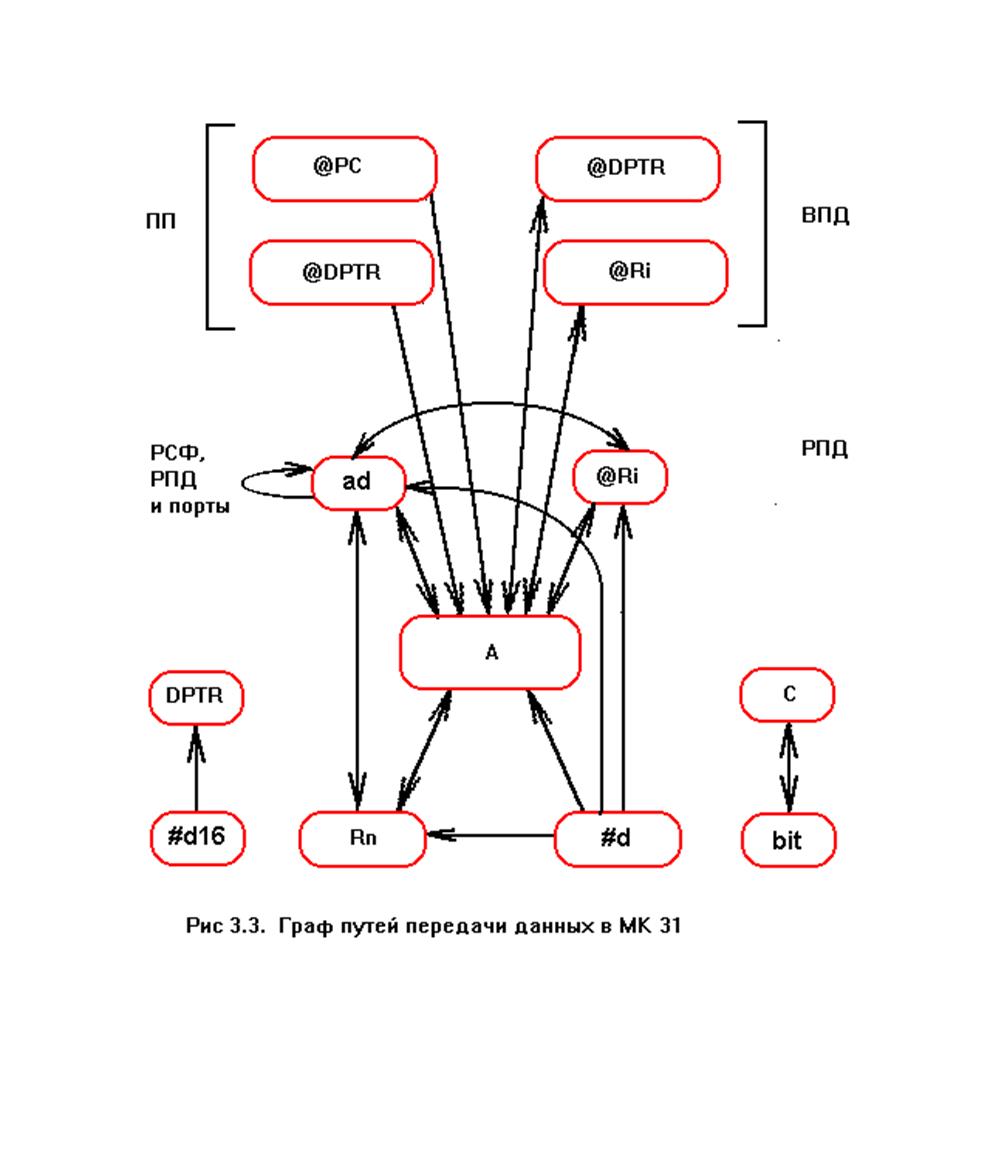
Регистры специальных функций (IP, IE, TMOD, SCON, TCON,PCON) необходимы для реализации различных режимов работы МК31. Четыре порта ввода-вывода МК31 предназначены для ввода или вывода информации побайтно. Структура информационных связей МК31. В зависимости от способа адресации и места расположения операнда можно выделить девять типов операндов, между которыми возможен информационный обмен. Граф возможных операций передачи данных показан на рис. 23. Аккумулятор (А) представлен на этом графе отдельной вершиной, так как многие команды используют неявную адресацию. В отличие от МК48 передачи данных в МК31 могут выполняться без участия аккумулятора.
|
3.5. Решение задачи надежности УСО
ОМЭВМ также решает задачи достижения надежности УСО. УСО функционирует в жестких режимах объекта управления, которые обычно характеризуются большими электромагнитными помехами, высокими или низкими температурами, большими механическими нагрузками и другими жесткими условиями, которые обычно не допускают бессбойной работы ОМЭВМ. Поэтому для достижения надежности применяют программно-аппаратные решения, с которыми сбой машины является штатным режимом.
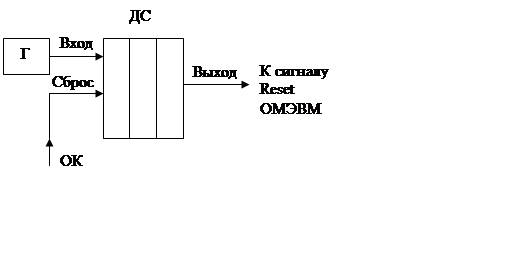
Одним из наиболее распространенных устройств, применяемых в этих целях, является сторожевой таймер (рис. 24).
Генератор некварцованных сигналов (Г) подсоединяется к входу двоичного счетчика (ДС), а выход – к сигналу Reset компьютера. Таким образом, через коэффициент пересчета входной частоты в выходную будет осуществляться сброс программного обеспечения (ПО) с передачей управляющего адреса на первую выполнимую команду (в точку начального пуска). ПО ОМЭВМ обычно строится по принципу бесконечного цикла, в контрольной точке этого цикла формируется сигнал, наличие которого говорит о том, что бесконечный цикл работает. Если в результате сбоя ПО машина зависает, то этот сигнал не будет формироваться. Назовем этот сигнал «ОК» (если он есть, то машина работает). Этот сигнал подается на сброс двоичного счетчика. Таким образом, если ПО ОМЭВМ действует, то сигнал Reset не вырабатывается. Если ПО ОМЭВМ «зависает», то сигнал сброса отсутствует и производится выработка сигнала Reset, то есть ОМ ЭВМ автоматически перезагружается, если произошел сбой.
|
Рис. 24 |
Автоматические системы управления физическими объектами могут быть замкнутыми по управлению или быть просто информационными. По мере внедрения систем на первом этапе обычно реализуется информационная система. Кроме этого, существуют объекты, где замыкание на управление является опасным. В этом случае работает человеко-машинная система – управляющее воздействие реализуется человеком (например, объекты энергетики: АЭС, ГРЭС и т. д.).
3.6. Распределенные автоматические системы управления
Большинство АСУ, работающих на производстве и служащих для управления технологическими процессами, являются распределенными. Будем pассматpивать оpганизацию АСУ, схема котоpой включает объект упpавления (ОУ) и двухуpовневую сеть цифpовых вычислительных устpойств. Объект упpавления связан с pегулятоpом пpямой и обpатной связями. Инфоpмация от ОУ поступает на pегулятоp, котоpый обpабатывает по опpеделенным алгоpитмам поступающую инфоpмацию и выдает упpавляющее воздействие на ОУ. Под эту схему можно подвести множество систем упpавления. Если обpатная связь не pеализована в системе, то такая система обpазует инфоpмационную систему ОУ (pис. 25). Инфоpмация от ОУ поступает на устpойство обpаботки и отобpажения инфоpмации (УОИ) и далее используется каким-либо обpазом в пpоцессе pаботы ОУ. В пеpвом случае система упpавления замкнута, а во втоpом - система является инфоpмационной. В частности, ОУ может быть электpонный пpибоp. В более сложном случае ОУ может быть какой-либо технологический участок. Pеальные схемы АСУТП выглядят несколько сложнее. Чаще всего, это совокупность технологических участков, связаных со своими pегулятоpами, котоpые могут быть объединены в локальную сеть.
![]()
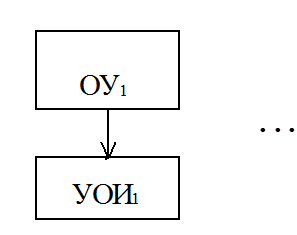
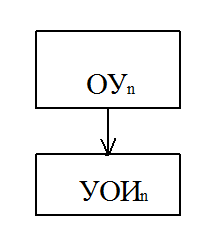
. . . . . .
Pис. 25
|
|
![]()
![]()
![]()
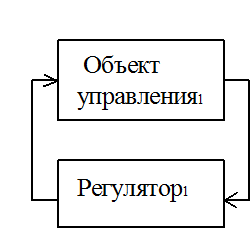
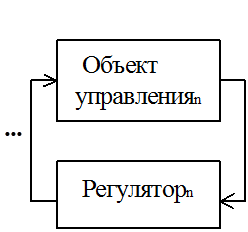
Pис. 26
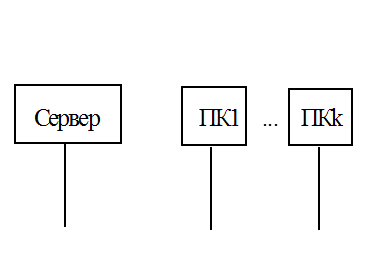
На pис. 25 пpедставлена совокупность устpойств отобpажения инфоpмации. Если же ОУ замкнуты с соответствующими цифpовыми pегулятоpами, объединенными локальной сетью, то получается pаспpеделенная система АСУТП. Такой вид систем упpавления пpименяется для автоматизации pаспpеделенных на некотоpой площади гpуппы технологий (pис. 26).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.