2. На конвейере движется некоторый набор деталей, каждая из которых имеет видеоизображение. Геометрия (параметры геометрии) видеообраза определяет признаковые пространства. Поскольку геометрия образов известна, возможно построение алгоритма определения самого образа (распознавание). Эта задача называется техническим зрением.
По размеру N признакового пространства задачи распознавания образов разделяются:
−
на задачи малой
размерности (![]() );
);
−
задачи средней
размерности (![]() );
);
−
задачи большой
размерности (![]() ).
).
Так как размер функционального пространства может быть велик, то для построения F используют приближённые методы аппроксимации многомерной функции F.
Одна из простейших моделей — гиперплоскость:
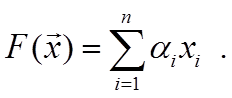
Задача обучения состоит в
вычислении коэффициентов ![]() . Нормируя
. Нормируя ![]() его максимальным значением, получим
его максимальным значением, получим
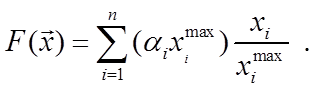
Величина  часто рассматривается как вес
признака. Очевидно, чем больше
часто рассматривается как вес
признака. Очевидно, чем больше ![]() , тем больше числовое значение (в среднем)
, тем больше числовое значение (в среднем) ![]() признака. Определение
веса признака является первой важнейшей задачей в алгоритмах распознавания.
признака. Определение
веса признака является первой важнейшей задачей в алгоритмах распознавания.
Различают статистические и детерминистские методы построения функции F. Большинство статистических методов основано на известном вероятностном методе Байеса. Кроме того, существует много детерминистских методов, одни из которых основаны на использовании тригонометрических рядов. Было замечено, что для многих физических моделей коэффициенты ряда хорошо коррелируют с признаками модели. В этом случае функцию определяют следующим образом:

Аргумент t участвует в определении класса, то есть через него задаётся алгоритм определения класса.
Процент распознавания определяется по числу правильно распознанных классов некоторой экзаменуемой последовательности, которая не пересекается с обучающей последовательностью.
3. Применение ЭВМ для автоматизации физического эксперимента
3.1. Структура системы автоматизации
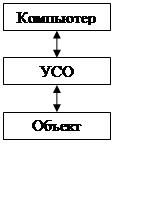
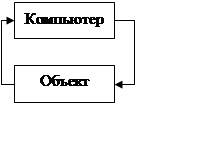
Кроме вычислительных работ компьютер широко применяется в системах, в которых информация непосредственно с объекта (физической установки) поступает в компьютер в цифровом виде. Кроме этого, компьютер, по мере решения задач управления, передает на устройство объекта управляющее воздействие (рис. 15).
Таким образом, организуется функция системы объект-компьютер в текущее (реальное) время в автоматическом режиме. Для согласования объекта с компьютером применяются специальные устройства – устройства согласования с объектом (УСО). УСО со стороны объекта соединяется с устройствами – датчиками, преобразующими значение физической величины в электрическую величину (аналоговую) – ток или напряжение. Таким образом, схема имеет вид, представленный на рис. 16.
|
Рис. 15 Рис. 16 |
Датчики строятся с учетом различных физических эффектов. Например, для измерения температуры простейшим датчиком может быть термопара. Измерения температуры – обычно наиболее емкие измерения. Для стандартизации сигналов аналоговые сигналы (ток, напряжение) приводятся к стандартным величинам: ток на выходе нормирующего усилителя (НУ) приводится к диапазону 0 – 20 мА при изменении физической величины от минимального до максимального значения. Для напряжения соответственно 0 – 5 В, 0 – 10 В, либо -5 – 5 В.
3.2. Устройства согласования с объектом
УСО состоят из множества модулей, которые управляются микрокомпьютером (МК). Современный микрокомпьютер строится в виде одноплатной цифровой ЭВМ на базе однокристальной микроЭВМ (ОМЭВМ). Кристалл микроЭВМ объединяет такие устройства, как процессор, ОЗУ, ПЗУ, порты ввода-вывода, а также может содержать дополнительные устройства, необходимые для организации УСО. Для программирования ОМЭВМ применяется схема, приведенная на рис. 17.
Программатор – это специальное техническое устройство, соединенное с компьютером, на котором имеется коммутационная панель для ОМЭВМ. Для таких работ имеется специальное программное обеспечение программаторов, включающее трансляторы с различных языков, для программирования ОМЭВМ, эмуляторы, позволяющие моделировать функционирование объекта, а также драйверы, позволяющие осуществлять связь с ОМЭВМ и производить запись информации в ПЗУ ОМЭВМ с режимом фиксации информации. Количество перезаписей ПЗУ колеблется от одного до десятков тысяч и более. Оно зависит от технологии изготовления ПЗУ.
|
Рис. 17 |
Для преобразования аналоговой величины в цифровую применяют аналого-цифровой преобразователь (АЦП). Для преобразования обратного сигнала из компьютера – цифрового в аналоговый – применяют цифроаналоговый преобразователь (ЦАП). Для ввода-вывода дискретной информации применяют модули ввода-вывода дискретных сигналов (МВВДС).
3.3. Аналого-цифровые и цифроаналоговые преобразователи.
АЦП характеризуется несколькими параметрами:
1) количеством каналов ввода информации;
2) временем преобразования аналогового сигнала в цифровой;
3) Разрядностью АЦП.
|
Рис. 18 ЭК – электронный коммутатор, СУ – согласующий усилитель, АШ – адресная шина, ШУ – шина управления, К1 - Кn – каналы АЦП |
Автоматизация различных физических процессов требует различных АЦП, которые в основном различаются по количеству каналов и времени преобразования сигнала. Чем быстрее преобразование, тем в реальном времени требуется более малое время преобразования. Например, процессы современной электроэнергетики относительно медленные процессы (время преобразования удовлетворительно в пределах миллисекунд). В энергетических установках термоядерного синтеза (исследовательских) – сверхбыстрые процессы. Необходимое время преобразования – наносекунды. Такое время преобразования недостижимо. В этом случае в архитектуру АЦП вводится специальное устройство предварительного запоминания информации в аналоговом виде с последующим преобразованием сигнала после протекания самого процесса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.