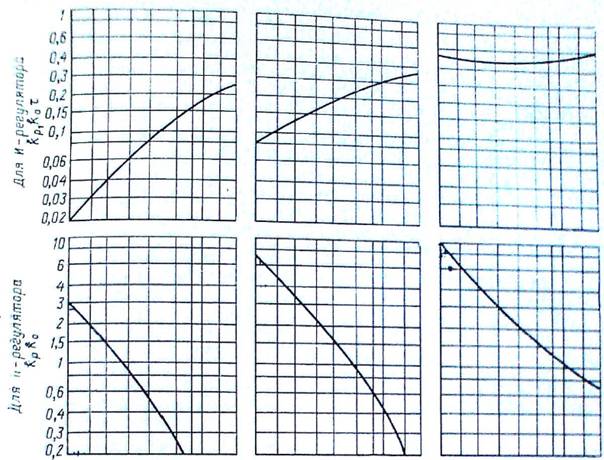
Подбор регулятора начинаем с определения максимального динамического отклонения регулируемой величины в замкнутом контуре:
![]()
![]() определяется равенством:
определяется равенством:
![]()
![]() Rд
– динамический коэффициент регулирования
Rд
– динамический коэффициент регулирования
kо – коэффициент передачи объекта по каналу регулирующего
воздействия
![]() скачкообразное
возмущающее воздействие.
скачкообразное
возмущающее воздействие.
![]() .
.
Т.о:
![]()
![]() 10
10
![]()
![]()
В случае П–регулятора дополнительно проверяем величину статической ошибки регулирования yст на соблюдение неравенства:
![]()
Статическая ошибка регулирования определяется из равенства:
![]()
![]() определили
из начальных условий по показателям качества.
определили
из начальных условий по показателям качества.
Т.о:
![]()
![]()
![]()
Проверка регулятора на время регулирования tр :
![]()
![]()
![]()
По графикам, используя полученные условия, выбираем допустимые законы регулирования:
|
Варианты переходного процесса |
Апериодический |
С 20%-ным перерегулированием |
С минимальной квадратичной площадью отклонения |
|
Допустимые законы регулирования |
П, ПИ, ПИД |
П, ПИ, ПИД |
П, ПИ, ПИД |
Определение параметров настройки регулятора
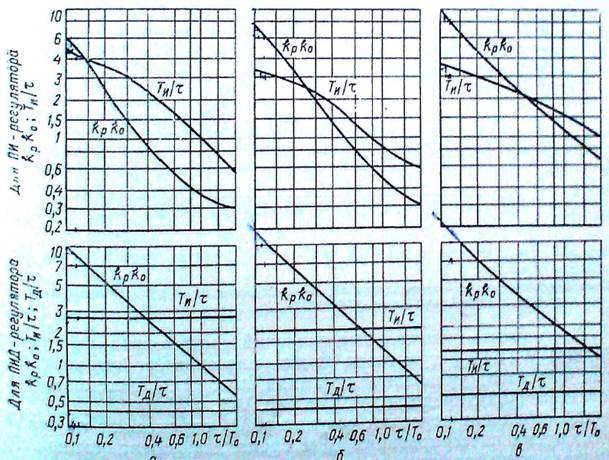
1. Графический метод
Определим параметры настройки регулятора из графических зависимостей, полученных при моделировании САР на ЭВМ:
|
Закон |
Переходный процесс |
||
|
Апериодический |
С 20%-ным перерегулированием |
С минимальным квадратичным отклонением |
|
|
П |
|
|
|
|
ПИ |
|
|
|
|
ПИД |
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.