c) Время регулирования не больше двух постоянных времени объекта.
d)Скачкообразное возмущение принять в размере 10% от номинальной мощности нагревателя.
5. Определить параметры настройки регулятора для выбранных законов по той же методике.
6. Составить математическую модель замкнутой САР, структура которой показана на рис. 1.
.
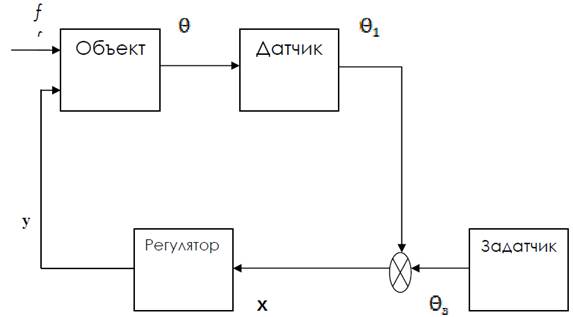
Рис.1 Структура САР температуры
Законы регулирования представлять в виде:
И-закон: ![]()
П-закон: ![]()
ПИ-закон: ![]()
ПИД-закон: ![]()
При выводе передаточной функции замкнутой системы принять по заданию преподавателя один из следующих комбинаций вход-выход САР:
1. Вход θз – Выход θ
2. Вход θз – Выход x
3. Вход ƒ – Выход θ
4. Вход ƒ– Выход x
7. Провести численное моделирование процесса регулирования в САР (компьютерная программа PP.exe) при законах регулирования и параметрах настройки регулятора, согласованных с преподавателем. В программу PP ввести коэффициенты передаточной функции САР: ai, bi и возмущение f (уровень скачка).
Сравнить полученные показатели качества с заданными. Если заданные показатели качества не выполнены, то проанализировать возможность их выполнения коррекцией настроек регулятора.
8. Оценить возможности использования двухпозиционного регулятора (компьютерная программа DV.exe вариант dv.1), считая, что характеристика регулятора имеет вид, показанный на рис. 2.
В программу dv.1 ввести: T0, Tд, k0, Wmax, Qзад, ƒ, n=0,2 (шаг численного интегрирования).
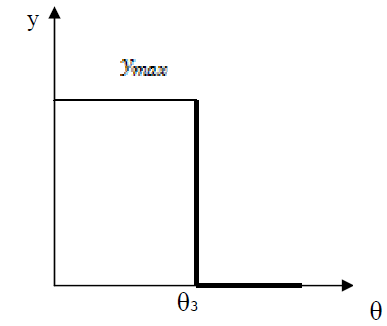
Рис 2. Характеристика двухпозиционного регулятора
Принять максимальную мощность нагревателя равной удвоенной номинальной мощности. Сравнить размах автоколебаний с допустимой статической ошибкой, что позволит ответить на поставленный в данном пункте вопрос о возможности использования такого регулятора. Обратить внимание на период автоколебаний, частота которых может повлиять на надежность системы.
9. Предполагая, что регулятор реализуется в микропроцессорном варианте, разработать схему согласования выбранного датчика с входом микроконтроллера и схему управления микроконтроллером мощностью, подаваемой в электронагреватель.
Объект регулирования и его характеристики
Термоэлектропластификатор (ТЭП)
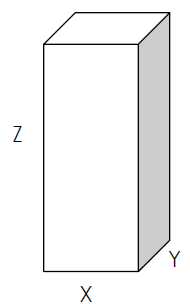
Обеспечивает нагрев синтетической нити, скользящей по его рабочей поверхности (XZ).
X, Y, Z – геометрические размеры, мм;
Текс – линейная плотность нити (капрон), г/км;
θЗ – заданная температура, °С;
α – коэффициент теплоотдачи от поверхности, Вт/м2град;
V – линейная скорость нити, м/мин;
Материал объекта – сталь
Исходные данные по объекту:
Вариант 1
|
Величина |
Значение |
|
X |
20 |
|
Y |
20 |
|
Z |
200 |
|
θЗ |
200 |
|
α |
40 |
|
V |
800 |
|
Текс |
187 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.