









Физические основы регулирования
момента и скорости в вентильном электроприводе ЭПБ1.
Синхронный двигатель. Вентильный электропривод ЭПБ выполнен на базе трехфазного синхронного двигателя с постоянными магнитами на роторе, основное преимущество которого по сравнению с двигателем постоянного тока заключается в отсутствии коллектора. Это практически исключает профилактический уход за двигателем в процессе эксплуатации и повышает его надежность. Кроме того, отсутствие коллектора позволяет питать двигатель от источника энергии с высоким напряжением (в данном случае 520 В постоянного тока), то есть производить бестрансформаторное подключение силовой части электропривода к сети 380 В. В результате этого экономится силовой понижающий трансформатор, всегда имеющийся в электроприводах постоянного тока с высокомоментными двигателями.
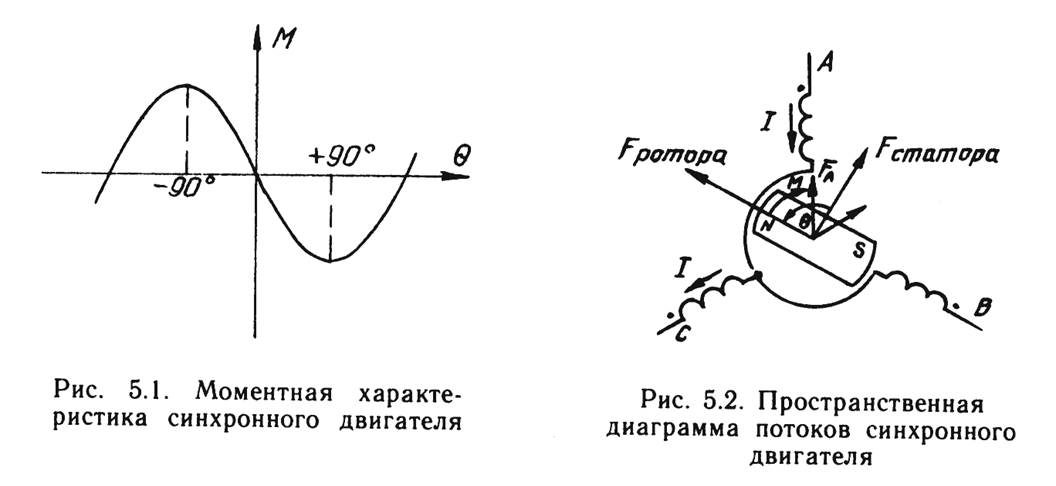
Момент, возникающий в синхронном двигателе, связан с наличием двух независимых потоков — статора и ротора. Магнитный поток статора всегда стремится развернуть ротор с постоянными магнитами таким образом, чтобы магнитный поток ротора совпал по направлению с магнитным потоком статора. Точно так же действует магнитное поле Земли на магнитную стрелку компаса. И если в последнем случае направления потоков совпадают, то в синхронном двигателе за счет датчика положения ротора угол между направлениями потоков поддерживается близким к 90° (точнее, он может находиться в диапазоне (90°±30°)/р, где р — число пар полюсов двигателя; для двигателя типа 4СХ2П100L8 р=4).
Возникающий при этом момент подчиняется зависимости

где р — число пар полюсов двигателя; Θ — пространственный угол между направлениями потоков, отсчитываемый от вектора потока статора к вектору потока ротора; См — постоянная момента двигателя; /тах — мгновенное значение тока, протекающего из одной фазы двигателя в другую. Примем пока, что Imax=соnst, то есть через фазы двигателя протекает ток постоянной величины; Мmах — определяется величиной магнитных потоков статора и ротора. Знак минус означает, что направление момента всегда противоположно направлению угла рассогласования потоков.
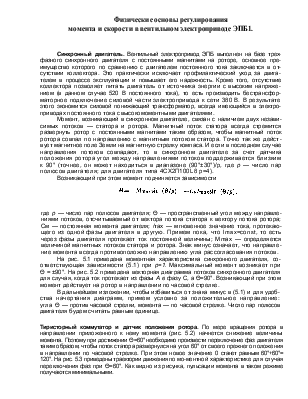
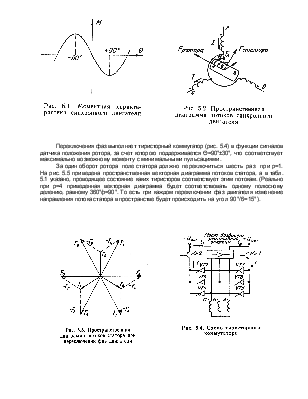
На рис. 5.1 приведена моментная характеристика синхронного двигателя, соответствующая зависимости (5.1) при р=1. Максимальный момент возникает при Θ = ±90°. На рис. 5.2 приведена векторная диаграмма потоков синхронного двигателя для случая, когда ток протекает из фазы А в фазу С, а Θ=90°. Возникающий при этом момент действует на ротор в направлении по часовой стрелке.
В дальнейшем изложении, чтобы избавиться от знака минус в (5.1) и для удобства начертания диаграмм, примем условно за положительное направление: угла Θ — против часовой стрелки, момента — по часовой стрелке. Число пар полюсов двигателя будем считать равным единице.
Тиристорный коммутатор и датчик положения ротора. По мере вращения ротора в направлении приложенного к нему момента (рис. 5.2) начнется снижение величины момента. Поэтому при достижении Θ=60° необходимо произвести переключение фаз двигателя таким образом, чтобы поток статора развернулся на угол 60° от своего прежнего положения в направлении по часовой стрелке. При этом новое значение 0 станет равным 60°+60°= 120°. На рис. 5.3 приведены траектории движения по мо-ментной характеристике для случая переключения фаз при Θ=60°. Как видно из рисунка, пульсации момента в таком режиме получаются минимальными.
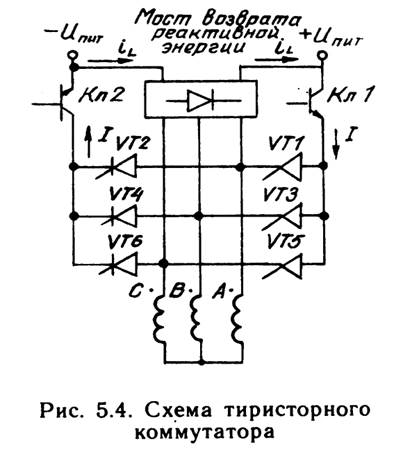
Переключения фаз выполняет тиристорный коммутатор (рис. 5.4) в функции сигналов датчика положения ротора, за счет которого поддерживается Θ=90°±30°, что соответствует максимально возможному моменту с минимальными пульсациями.
За один оборот ротора поле статора должно переключиться шесть раз при р=1. На рис. 5.5 приведена пространственная векторная диаграмма потоков статора, а в табл. 5.1 указано, проводящее состояние каких тиристоров соответствует этим потокам. (Реально при р=4 приведенная векторная диаграмма будет соответствовать одному полюсному делению, равному 360°/р=90°. То есть при каждом переключении фаз двигателя изменение направления потока статора в пространстве будет происходить на угол 90°/6=15°).
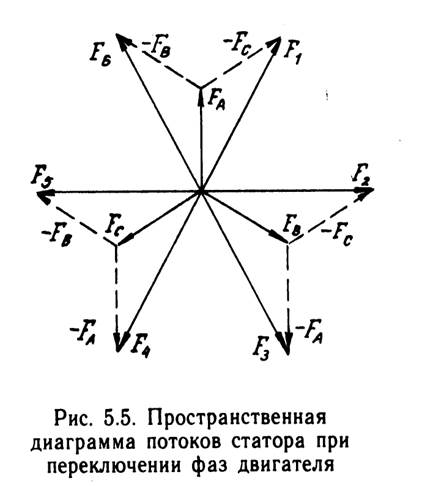
р=1. На рис. 5.5 приведена пространственная векторная диаграмма потоков статора, а в табл. 5.1 указано, проводящее состояние каких тиристоров соответствует этим потокам. (Реально при р=4 приведенная векторная диаграмма будет соответствовать одному полюсному делению, равному 360°/р=90°. То есть при каждом переключении фаз двигателя изменение направления потока статора в пространстве будет происходить на угол 90°/6=15°).
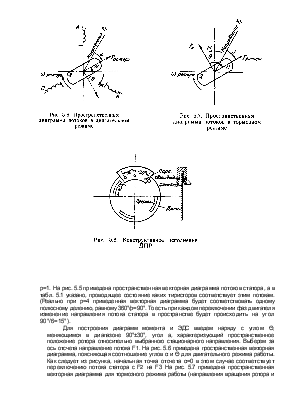
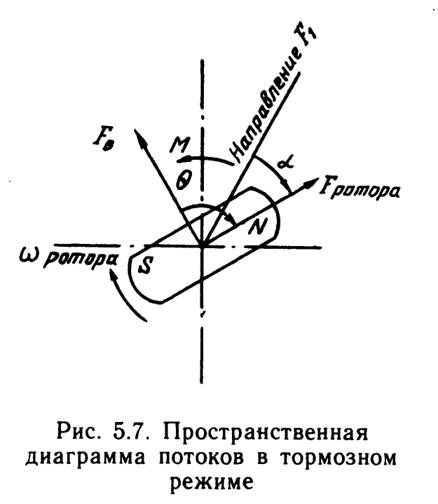
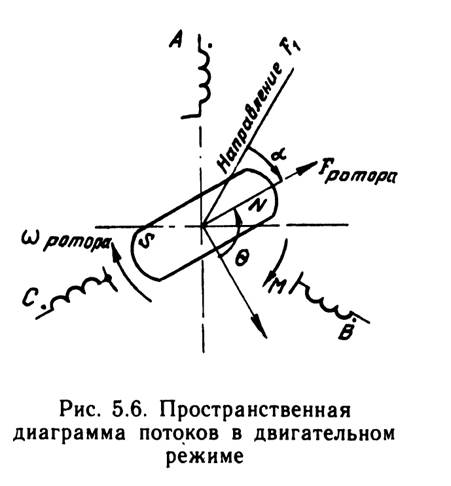
Для построения диаграмм момента и ЭДС введем наряду с углом Θ, меняющимся в диапазоне 90°±30°, угол а, характеризующий пространственное положение ротора относительно выбранного стационарного направления. Выберем за ось отсчета направление потока F1. На рис. 5.6 приведена пространственная векторная диаграмма, поясняющая соотношение углов α и Θ для двигательного режима работы. Как следует из рисунка, начальная точка отсчета α=0 в этом случае соответствует переключению потока статора с F2 на F3 На рис. 5.7 приведена пространственная векторная диаграмма для тормозного режима работы (направления вращения ротора и приложенного к нему момента противоположны). В этом случае положение ротора при а=0 соответствует переключению потока статора с F5 на F6.
Заметим, что если в двигательном режиме работы поток статора опережает поток ротора в направлении вращения ротора, увлекает его за собой и по мере вращения ротора при сближении потоков на Θ=60° вновь переключается на Θ=120° в сторону опережения, то в тормозном режиме работы поток статора отстает от потока ротора в направлении вращения ротора и уже как бы следит за ним, чтобы, если по мере вращения ротора удаление потоков достигнет Θ=120°, вновь переключиться на Θ=60°.
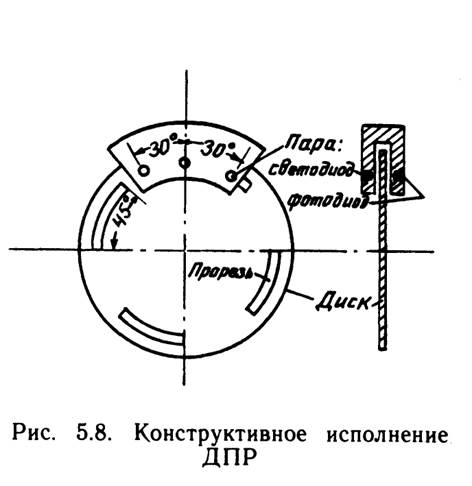
Переключение фаз двигателя производится тиристорным коммутатором в функции сигналов датчика положения ротора (ДПР). ДПР состоит из трех пар светофото-диодов, жестко привязанных к статору, между которыми вращается диск, закрепленный на роторе (рис. 5.8).
Для р=1 диск имеет одну прорезь с угловым размером 180°, а пары светофото-
диодов разнесены в пространстве на угол 120°. У двигателя 4СХ2П100L8 р=4, поэтому на диске его ДПР имеется четыре прорези с угловыми размерами 180°/4=45°, а пары
светофотодиодов отделены друг от друга в пространстве на угол 120° /4= 30°.
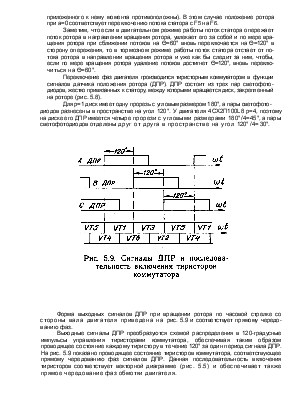
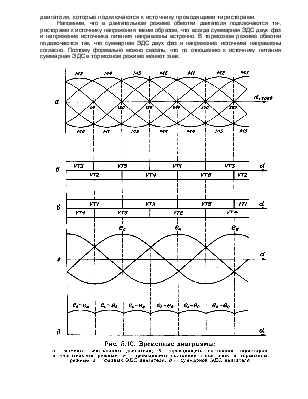
Форма выходных сигналов ДПР при вращении ротора по часовой стрелке со стороны вала двигателя приведена на рис. 5.9 и соответствует прямому чередованию фаз.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.