
где Uпит — напряжение источника питания; i — ток, протекающий через две фазы двигателя; Rдв— сопротивление двух обмоток двигателя; LДВ — индуктивность двух обмоток двигателя; Eдв— суммарная ЭДС двух фаз двигателя.
Знак плюс перед ЭДС соответствует двигательному режиму работы, знак минус — тормозному.
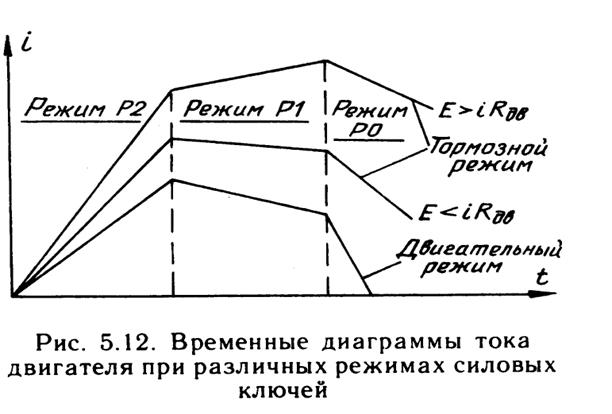
В режиме Р2 в рабочем диапазоне скоростей всегда происходит нарастание тока через обмотки двигателя, поскольку напряжение источника, питания выбирается выше ЭДС двигателя. Например, при бестрансформаторном подключении (/пит = 520 В, а амплитудное значение ЭДС для двигателя 4СХ2П100L8 на скорости лдв = = 1500 об/мин составляет около 300 В. Изменяется лишь величина di/dt, уменьшаясь в двигательном режиме и возрастая в тормозном. На рис. 5.12 показан характер из-
менения тока через фазы двигателя при различных режимах работы силовых ключей.
При переходе из режима Р2 в режим Р1 выключается один из ключей. Например, если в третьем состоянии коммутатора (рис. 5.4) протекание тока от клеммы +Uпит происходило по следующей цепи: Кл1, VТЗ, фаза Я, фаза A, VТ2, Кл2,— Uпит и выключился ключ Кл2, тогда ток под действием ЭДС самоиндукции будет продолжать протекать по замкнутому контуру: Кл1, VТЗ, фаза В, фаза A, диод моста возврата реактивной энергии, Кл1.
В этом режиме уравнение (5.2) приобретает вид:

При этом в двигательном режиме наблюдается спадание тока под действием + Едв и iRдв, а в тормозном режиме может быть как спадание тока (di/dt<0, если Едв< iRдв), так и нарастание его (di/dt>0, если Едв> iRдв).
В режиме РО ток протекает по фазам двигателя под действием ЭДС самоиндукции через диоды моста возврата реактивной энергии навстречу напряжению источника питания. Например, если в предыдущем случае выключается ключ Кл1, ток через обмотки двигателя продолжает протекать по цепи: фаза А, диод моста, +Uпит, -Uпит, диод моста, фаза В. При этом всегда происходит спадание тока в соответствии с уравнением

Спадание тока происходит более интенсивно в двигательном режиме и менее интенсивно в тормозном (рис. 5.12).
Алгоритм работы регулятора тока построен таким образом, что при равенстве мгновенного значения тока заданному значению включается режим Р1. Как видно из рис. 5.12, в режиме Р1 может быть как спад тока, так и нарастание тока.
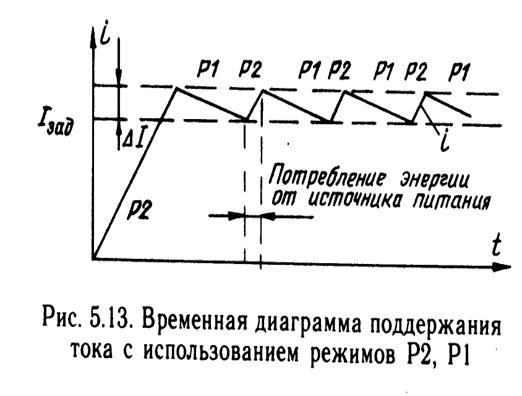
Поэтому, если ток спадает и достигает величины отклонения ΔI или спад происходит медленно, через выдержку времени τ на смену режиму Р1 включается Р2, вынуждающий ток снова расти. Поддержание тока на заданном уровне при Iзад=const достигается в этом случае простым чередованием режимов Р1 и Р2 (рис. 5.13). Поддержание тока таким способом может происходить в двигательном режиме и в тормозном на малых скоростях (Едв< iRдв). В этих режимах происходит потребление энергии от источника питания, причем во время существования режима Р1 энергия рассеивается на активном сопротивлении двигателя, а в период существования режима Р2 потребляется от источника питания.
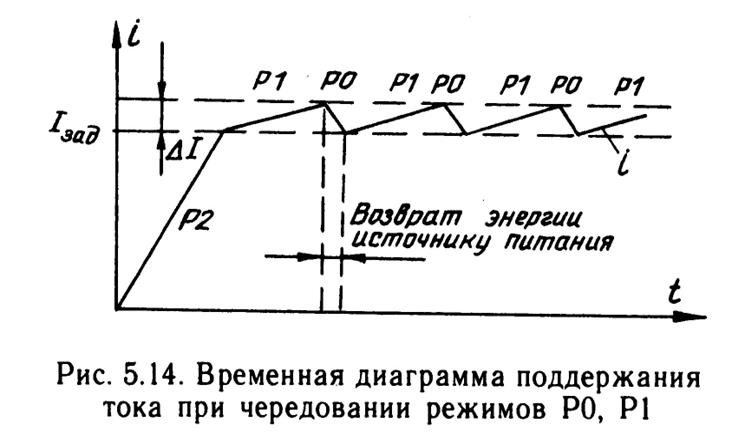
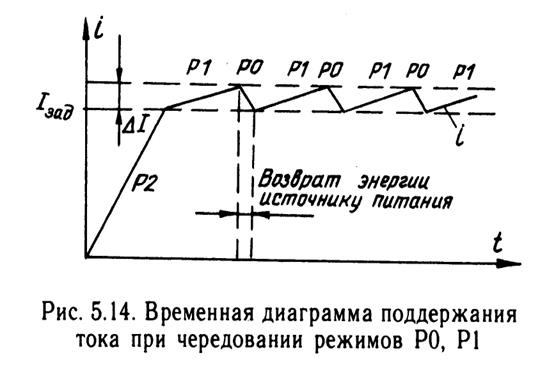
Если ток в режиме Р1 нарастает и достигает величины отклонения ΔI или нарастание происходит медленно, через выдержку времени т включается режим Р0, вынуждающий ток уменьшаться. Поэтому при Iзад=const для поддержания тока в этом случае достаточно чередовать режимы Р1 и Р0 (рис. 5.14). Таким способом поддержание тока может осуществляться на больших скоростях (Едв>iRдв) в тормозном режиме, сопровождаясь возвратом энергии источнику питания путем его подзарядки на большее напряжение. Возврат энергии происходит в периоды существования режима РО.
Контур скорости. До сих пор мы рассматривали вопросы, связанные с регулированием момента и ничего не говорили о регулировании скорости.
В вентильном электроприводе ЭПБ регулирование скорости принципиально возможно только в замкнутой по скорости системе, в отличие от приводов постоянного тока, где можно регулировать скорость и в разомкнутой системе, например, подавая задающее напряжение непосредственно на вход СИФУ.
Поддержание заданной скорости в вентильном приводе ЭПБ происходит следующим образом: регулятор скорости сравнивает токи от источника задающего напряжения и тахогенератора и вырабатывает сигнал рассогласования Upc, являющийся задающим для регулятора тока. Регулятор тока описанным выше способом формирует в двигателе ток, соответствующий величине напряжения, заданной регулятором скорости.
Возникающий момент, двигательный или тормозящий, будет увеличивать или уменьшать скорость до тех пор, пока не сравняются токи на входе регулятора скорости. Таким образом, из условия равенства токов на входе регулятора скорости, имеющего интегральную характеристику, в установившемся режиме можно записать:

где (ω — угловая скорость вращения двигателя; Ктг — коэффициент передачи тахогенератора; Uзад— задающее напряжение; Rзад— входное сопротивление РС со стороны задающего напряжения; Rω — входное сопротивление РС со стороны тахогенератора.
Формула (5.5) описывает регулировочную характеристику вентильного электропривода ЭПБ.
Нагрузочная характеристика привода определяется интегральной характеристикой регулятора скорости. Теоретически система регулирования, имеющая пропорционально-интегральный регулятор скорости, является астатической.
Операционный усилитель, на основе которого выполнен РС привода, обладает таким высоким статическим коэффициентом передачи, что практически скорость также не зависит от нагрузки.
КОНТУР СКОРОСТИ.
В ЭПБ регулирование скорости принципиально возможно только в замкнутой по скорости системе.
Поддержание заданной скорости возможно следующим образом: РС сравнивает токи от источника задающего напряжения и ТГ и вырабатывает сигнал рассогласования Uрс, являющийся задающим для РТ. РТ формирует в двигателе ток, соответствующий величине напряжения заданной регулятором скорости.
Возникающий момент, двигательный или тормозящий, будет увеличивать или уменьшать скорость до тех пор, пока не сравняются токи на входе РС. Т.о., из условия равенства токов на входе РС, имеющего неинтегральную характеристику, в установившемся режиме можно записать:
 или
или  .
.
Rзад – входное сопротивление РС со стороны задающего напряжения;
 - входное сопротивления со стороны
ТГ; (ПИ-регулятор скорости).
- входное сопротивления со стороны
ТГ; (ПИ-регулятор скорости).
Расчет параметров коррекции РС.ия со стороны ТГикуледующим образом:
Рис.а. Полная структурная схема.
Рис.б. Упрощенная структурная схема.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.