Оглавление
![]() Введение 5
Введение 5
1.
![]() Обзор схем управления электромеханическими тормозами 8
Обзор схем управления электромеханическими тормозами 8
![]() 2. Схема и принцип действия контроллера механического тормоза 15
2. Схема и принцип действия контроллера механического тормоза 15
![]() 2.1. Принцип действия исследуемой схемы 17
2.1. Принцип действия исследуемой схемы 17
![]() 2.2. Расчёт силовой схемы и выбор элементной базы 22
2.2. Расчёт силовой схемы и выбор элементной базы 22
![]() 3. Моделирование электромагнитных процессов 28
3. Моделирование электромагнитных процессов 28
![]() 3.1. Описание модели контроллера механического тормоза 29
3.1. Описание модели контроллера механического тормоза 29
![]() 3.2. Результаты моделирования 33
3.2. Результаты моделирования 33
![]() Заключение 52
Заключение 52
![]() Список литературы 53
Список литературы 53
Введение
Механизмы грузоподъёмных машин обязательно должны быть снабжены надёжными тормозными устройствами. В механизмах подъёма они должны обеспечивать остановку груза и удержание его в подвешенном состоянии с заданным запасом торможения, а в механизмах передвижения и поворота — торможение до полной остановки на установленной длине тормозного пути. Повышение интенсивности производства и рост производительности труда, приводящие к повышению скоростей передвижения и увеличению движущихся масс, предъявляют всё более высокие требования к эффективности действия тормозных устройств. Тормоза подъёмно-транспортных машин повышают безопасность работы этих машин и их производительность.
Тормозные устройства подъёмно-транспортных машин классифицируют по следующим признакам:
1) по конструктивному выполнению рабочих элементов: на колодочные тормоза с рабочим элементом в виде колодки, трущейся по наружной или внутренней поверхности тормозного барабана (шкива); ленточные — с рабочим элементом в виде гибкой ленты, трущейся по тормозному барабану; дисковые — с рабочим элементом в виде целого кольцевого диска или отдельных сегментных колодок и конические — с рабочим элементом в виде конуса;
2) по принципу действия: на автоматические тормоза, замыкающиеся независимо от воли обслуживающего персонала одновременно с отключением двигателя механизма, на котором установлен тормоз, и управляемые тормоза, замыкание или размыкание которых производится обслуживающим персоналом при воздействии на орган управления;
3) по назначению: на стопорные тормоза, производящие остановку механизма, и спускные тормоза и регуляторы скорости, ограничивающие скорость движения в определённых пределах и действующие в течение всего периода работы соответствующего механизма;
4) по характеру действия силы, управляющей тормозом: на нормально закрытые тормоза, замыкание которых создаётся постоянно действующей силой, а размыкание, происходящее одновременно с включением привода механизма,— при приложении силы управления тормозом; нормально открытые тормоза, размыкаемые с помощью постоянно действующей размыкающей силы и смыкаемые при приложении силы управления тормозом; комбинированные тормоза, работающие в нормальных условиях как нормально открытые тормоза, а в аварийных условиях — как тормоза, нормально закрытые действием внешней замыкающей силы.
Ко всем тормозам независимо от их конструкции предъявляются следующие основные требования: достаточный тормозной момент для заданных условий работы; быстрое замыкание и размыкание; прочность и долговечность элементов тормоза; простота конструкции, определяющая малую стоимость изготовления; удобство осмотра, регулирования и замены износившихся деталей; устойчивость регулирования, обеспечивающая надёжность работы тормозного устройства; минимальный износ трущихся элементов; минимальные габариты и масса; ограниченная температура на поверхности трения, не превышающая предельную температуру для данного фрикционного материала.
Электромеханические колодочные тормоза в зависимости от рода тока можно разделить на следующие типы:
1) переменного трехфазного тока — тип КМТ;
2) переменного однофазного тока — тип МО;
3) постоянного тока — типы КМП, ТКП, ТКМП и др.
Чтобы обеспечить быстрое и безопасное замыкание и размыкание тормозов, устойчивость регулирования, а также обеспечить высокую надёжность работы тормозных устройств, у которых размыкателем является электромагнит, предлагается использовать специальный контроллер.
Контроллер электромеханического тормоза (КМТ) – устройство, предназначенное для оптимального управления и бесконтактной коммутации мощных индуктивных нагрузок: электромагнитных муфт, электромагнитных тормозов, электромагнитов.
В данной работе будет рассмотрен контроллер тормоза для управления электромеханического нормально закрытого тормоза, в котором используется электромагнит постоянного тока.
1. Обзор схем управления электромеханическими тормозами
Для обеспечения работы электромеханического тормоза необходимо преобразование переменного напряжения питающей сети в постоянное. Существует несколько схем, позволяющих осуществить необходимое преобразование.
Неуправляемый диодный выпрямитель по мостовой схеме
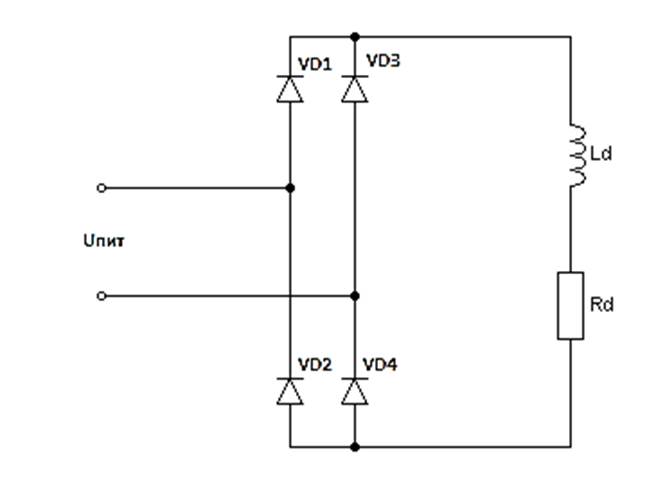
Рис. 1.1 Неуправляемый диодный выпрямитель по мостовой схеме
Схема, изображённая на рис. 1.1, является самым простым решением. Входной мост подключается к переменной сети питания 110 В, при отключении питания поле катушки гасится на дифференциальных сопротивлениях диодов моста.
Достоинствами данной схемы являются:
- Простота.
-Относительно низкая стоимость.
Недостатками данной схемы являются:
-Большое время втягивания и отпадания;
-Невозможность регулирования выходного напряжения.
Неуправляемый диодный выпрямитель по мостовой схеме с добавочным сопротивлением
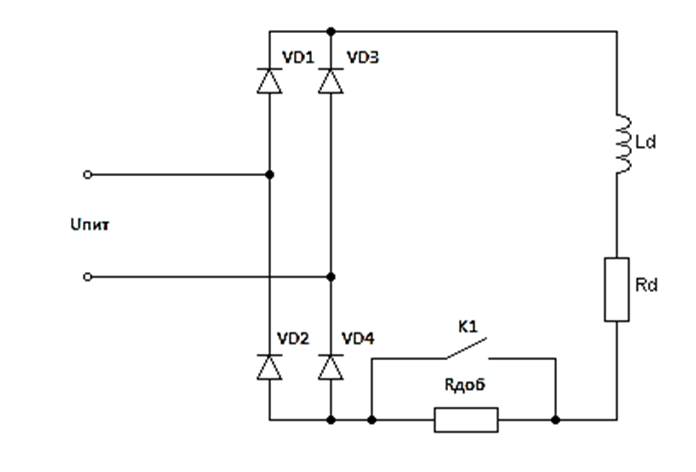
Рис. 1.2 Неуправляемый диодный выпрямитель по мостовой схеме с добавочным сопротивлением
Схема, изображённая на рис. 1.2, является развитием схемы с диодным мостом. Входной мост может подключается к переменной однофазной сети питания 110 В, а также к сетям 220 В, 440 В при условии наличия соответствующего добавочного сопротивления [2]. При запуске схемы добавочное сопротивление шунтируется ключом К1, чтобы обеспечить повышенный ток форсировки. Далее ключ размыкается, ограничивая ток на уровне тока удержания. При выключении питания поле соленоида гасится не только на диодах моста, но и на добавочном сопротивлении.
Достоинствами данной схемы являются:
- Простота;
-Уменьшенное время срабатывания.
Недостатками данной схемы являются:
-Большие потери на добавочном сопротивлении, и как следствие низкий КПД.
Управляемый тиристорный выпрямитель по мостовой схеме
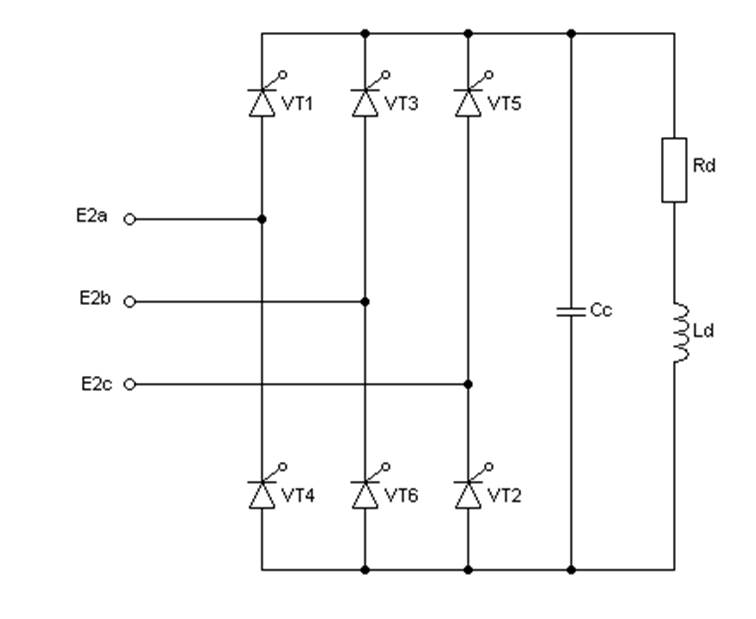
Рис. 1.3 Управляемый тиристорный выпрямитель по мостовой схеме
Приведённая схема (рис. 1.3) позволяет регулировать выходное напряжение выпрямителя путём изменения углов включения тиристоров.
Достоинствами данной схемы являются:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




