где
![]() – ДН антенной системы, также имеющей
вид кардиоиды (рис. 1, кривая 4). Прямая линия, проходящая через точки
пересечения кривых 3 и 4, определяет равносигнальное направление (РСН).
Осуществив переключение ДН антенной системы из одного положения в другое путем
коммутации фазы сигнала рамочной антенны, можно реализовать равносигнальный
метод пеленгования, при котором пеленг на радиостанцию определяется по признаку
равенства амплитуд сигналов, соответствующих первому и второму положениям ДН
антенной системы.
– ДН антенной системы, также имеющей
вид кардиоиды (рис. 1, кривая 4). Прямая линия, проходящая через точки
пересечения кривых 3 и 4, определяет равносигнальное направление (РСН).
Осуществив переключение ДН антенной системы из одного положения в другое путем
коммутации фазы сигнала рамочной антенны, можно реализовать равносигнальный
метод пеленгования, при котором пеленг на радиостанцию определяется по признаку
равенства амплитуд сигналов, соответствующих первому и второму положениям ДН
антенной системы.
Функциональная схема радиокомпаса представлена на рис.
7. Сигнал рамочной антенны поступает на фазовращатель, компенсирующий его фазовый
сдвиг на ![]() относительно сигнала штыревой
антенны, а затем усиливается в УВЧ до уровня, соответствующего уровню сигнала в
ненаправленной антенне. В балансном модуляторе (БМ) осуществляется
периодическое изменение на 180º фазы сигнала рамочной антенны с частотой
модуляции F = 30 Гц.
относительно сигнала штыревой
антенны, а затем усиливается в УВЧ до уровня, соответствующего уровню сигнала в
ненаправленной антенне. В балансном модуляторе (БМ) осуществляется
периодическое изменение на 180º фазы сигнала рамочной антенны с частотой
модуляции F = 30 Гц.
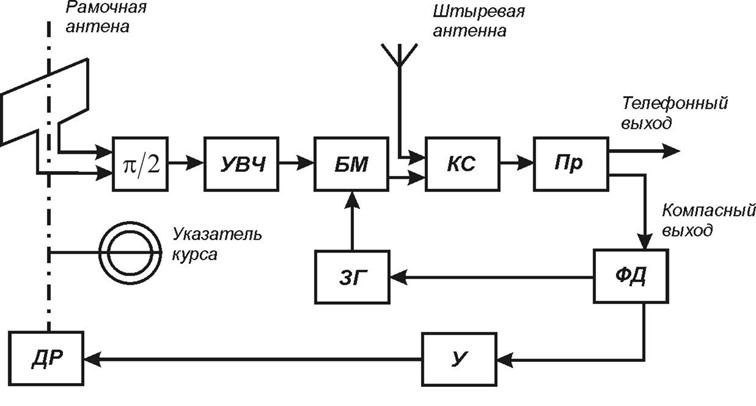
Рис. 7
В результате сигнал на выходе БМ имеет вид
 (8)
(8)
Здесь ![]() – коэффициент
усиления тракта «фазовращатель – УВЧ – балансный модулятор»;
– коэффициент
усиления тракта «фазовращатель – УВЧ – балансный модулятор»; ![]() – круговая частота модулирующего
колебания, формируемого звуковым генератором (ЗГ).
– круговая частота модулирующего
колебания, формируемого звуковым генератором (ЗГ).
Используя выражения (4) и (5) – (8) и полагая, что
коэффициент усиления ![]() выбран из условия
выбран из условия ![]() , записываем сигнал на выходе контура
сложения (КС) в виде
, записываем сигнал на выходе контура
сложения (КС) в виде
![]() (9)
(9)
Результирующий сигнал (9) представляет АМ колебание,
глубина модуляции которого определяется формой ДН ![]() рамочной
антенны. Временные диаграммы (рис. 8) поясняют формирование результирующего
сигнала на входе приемника для случаев положительного и отрицательного углов отклонения
α рамки относительно направления на радиостанцию, откуда видим, что изменение
знака угла α приводит к изменению фазы огибающей AM сигнала на 180°.
рамочной
антенны. Временные диаграммы (рис. 8) поясняют формирование результирующего
сигнала на входе приемника для случаев положительного и отрицательного углов отклонения
α рамки относительно направления на радиостанцию, откуда видим, что изменение
знака угла α приводит к изменению фазы огибающей AM сигнала на 180°.
В приемнике результирующий AM сигнал усиливается, отфильтровывается от помех и мешающих сигналов, не попадающих в полосу пропускания приемника, и детектируется. Приемник имеет два выхода: телефонный и компасный. Первый используется для прослушивания AM сигнала пеленгуемой радиостанции, а второй – для автоматического слежения за направлением прихода радиосигнала.
Сигнал на компасном выходе приемника ![]() представляет собой гармоническое
колебание частоты модуляции F = 30 Гц, амплитуда которого
представляет собой гармоническое
колебание частоты модуляции F = 30 Гц, амплитуда которого ![]() (
(![]() – коэффициент усиления приемного
тракта) содержит информацию о величине угла α, а фаза – о знаке этого угла.
– коэффициент усиления приемного
тракта) содержит информацию о величине угла α, а фаза – о знаке этого угла.
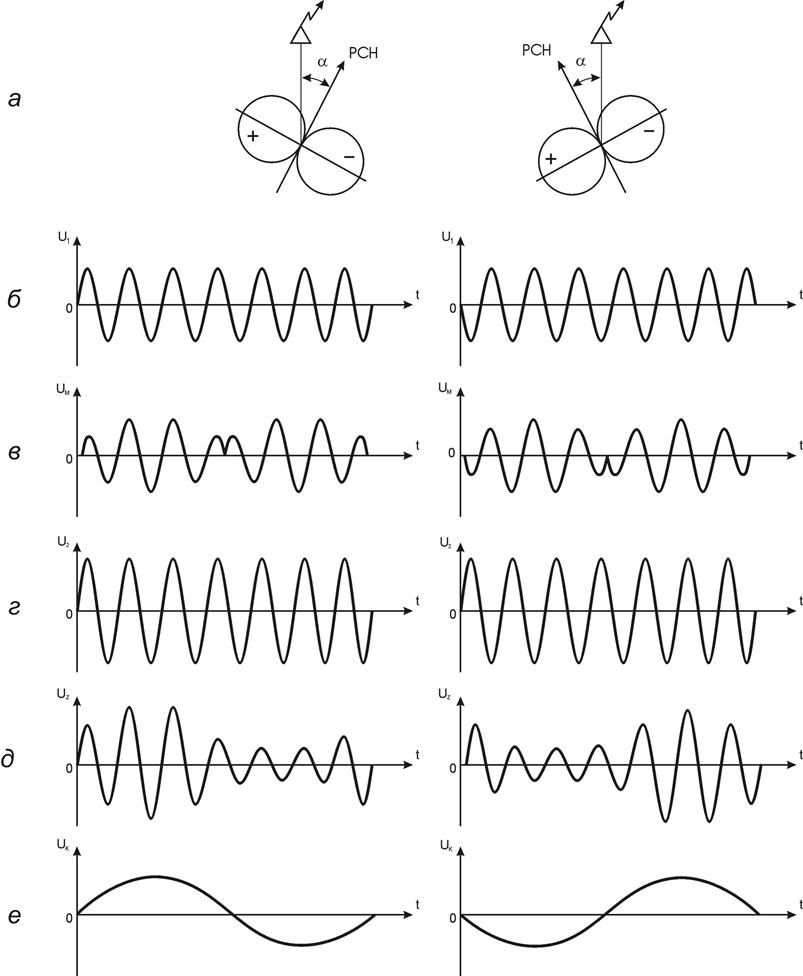
Рис. 8
Взаимное влияние выходных сигналов приемника (телефонного и компасного) исключается с помощью фильтров. На выходе компасного канала включен узкополосный фильтр, настроенный на частоту F = 30 Гц, а на выходе телефонного канала – режекторный фильтр, подавляющий колебание частоты F.
Гармонический сигнал ![]() поступает
на вход фазового детектора (ФД), на опорный вход которого подается то же самое
колебание частоты F = 30 Гц, которое используется в балансовом
модуляторе. Сигнал на выходе ФД определяется произведением входных сигналов:
поступает
на вход фазового детектора (ФД), на опорный вход которого подается то же самое
колебание частоты F = 30 Гц, которое используется в балансовом
модуляторе. Сигнал на выходе ФД определяется произведением входных сигналов:
![]() (10)
(10)
Здесь ![]() – коэффициент
передачи ФД;
– коэффициент
передачи ФД;  – максимальное значение
постоянного напряжения на выходе ФД (амплитуда опорного колебания
– максимальное значение
постоянного напряжения на выходе ФД (амплитуда опорного колебания ![]() ради простоты полагается разной
единице). При записи выражения (10) учтено, что составляющая выходного сигнала
удвоенной частоты 2Ω отфильтровывается следующим за ФД трактом
"преобразователь – магнитный усилитель – двигатель рамки", имеющим
узкую полосу пропускания (единицы Гц).
ради простоты полагается разной
единице). При записи выражения (10) учтено, что составляющая выходного сигнала
удвоенной частоты 2Ω отфильтровывается следующим за ФД трактом
"преобразователь – магнитный усилитель – двигатель рамки", имеющим
узкую полосу пропускания (единицы Гц).
Зависимость напряжения ![]() на
выходе ФД от углового рассогласования α (угол между РСН и направлением на
пеленгуемую радиостанцию) называется дискриминационной (иначе пеленгационной)
характеристикой (рис.9). Наличие начального углового рассогласования
на
выходе ФД от углового рассогласования α (угол между РСН и направлением на
пеленгуемую радиостанцию) называется дискриминационной (иначе пеленгационной)
характеристикой (рис.9). Наличие начального углового рассогласования ![]() (в момент включения радиокомпаса)
приводит к тому, что на выходе ФД формируется сигнал ошибки
(в момент включения радиокомпаса)
приводит к тому, что на выходе ФД формируется сигнал ошибки ![]() (постоянное напряжение), величина
которого пропорциональна
(постоянное напряжение), величина
которого пропорциональна ![]() , а знак
(полярность напряжения) определяется знаком углового отклонения
, а знак
(полярность напряжения) определяется знаком углового отклонения ![]() .
.
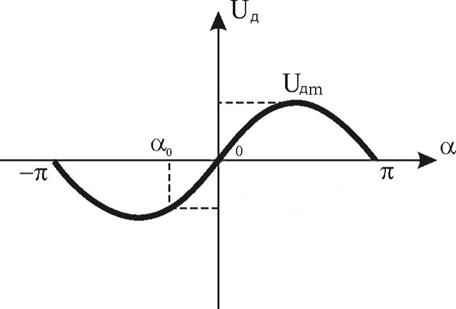
Рис. 9
С точки зрения формирования сигнала ошибки весь приемный тракт от входов обеих антенн до выхода ФД эквивалентен угловому дискриминатору с характеристикой вида (10). После преобразования в колебание частоты 400 Гц и усиления (преобразователь и усилитель на схеме объединены) сигнал ошибки подается на управляющую обмотку двигателя вращения рамки (ДР), обмотка возбуждения которого питается от напряжения с частотой 400 Гц, поступающего от блока питания. Ротор двигателя через редуктор соединен с осью рамки, вследствие чего в автоматическом режиме радиокомпаса осуществляется поворот рамки до тех пор, пока пеленгуемая радиостанция не окажется на равносигнальном направлении (α = 0). В этот момент на выходе УВЧ напряжение, создаваемое рамкой, равно нулю, в контуре сложения действует только сигнал штыревой (ненаправленной) антенны (модуляция частотой F = 30 Гц отсутствует) и сигнал ошибки на выходе ФД равен нулю. Отсчет курсового угла радиостанции производится по указателю курса, связанному системой следящего привода (сельсин-датчик – сельсин-приемник) с рамкой. Рамка имеет два направления нулевого приема, одно из которых является неустойчивым (рис. 6, кривая 2). Как только рамка отклонится от этого положения, даже на незначительный угол (например, под воздействием помехи), на выходе ФД появится сигнал ошибки, который заставит рамку вращаться по ходу часовой стрелки (если помеха сдвинула рамку вправо) или против часовой стрелки (если помеха сдвинула рамку влево) до тех пор, пока рамка не встанет в положение устойчивого равновесия (точка 0 на рис. 9). На передней панели радиокомпаса размещаются следующие органы управления:
● двухсекционные переключатели диапазонов и ручки подстройки частоты двух идентичных трактов приемника: основного (Б) и резервного (Д);
● тумблер переключения основного и резервного трактов приемника;
● тумблер вида сообщения (ТЛФ-ТЛГ);
● регулятор громкости телефонного канала;
● индикатор настройки;
● переключатель режимов работы;
● переключатель направления вращения рамки;
● контрольные гнезда для подключения измерительных приборов;
● гнездо для подключения штыревой (ненаправленной) антенны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.