Если отклонение угла ![]() ,
то получим
,
то получим ![]() , т.е.
, т.е. ![]() и
скорость
и
скорость ![]() становиться больше синхронной
скорости
становиться больше синхронной
скорости ![]() (
(![]() ).
В результате
).
В результате ![]() увеличивается. С ростом
увеличивается. С ростом ![]() мощность
мощность ![]() продолжает
падать, что вызывает дальнейшее еще более интенсивное увеличение
продолжает
падать, что вызывает дальнейшее еще более интенсивное увеличение ![]() , в результате генератор выпадает из
синхронизма в сторону увеличения скорости вращения.
, в результате генератор выпадает из
синхронизма в сторону увеличения скорости вращения.
Если отклонение угла ![]() ,
то получим
,
то получим ![]() , т.е.
, т.е. ![]() и
скорость
и
скорость ![]() становиться меньше синхронной
скорости
становиться меньше синхронной
скорости ![]() (
(![]() ).
В результате
).
В результате ![]() уменьшается. При
уменьшается. При ![]() после затухающего колебательного
переходного процесса устанавливается режим соответствующий точке
после затухающего колебательного
переходного процесса устанавливается режим соответствующий точке ![]() . А при
. А при ![]() получим
самораскачивание с последующим выпадением из синхронизма (см. рис.3.5).
получим
самораскачивание с последующим выпадением из синхронизма (см. рис.3.5).
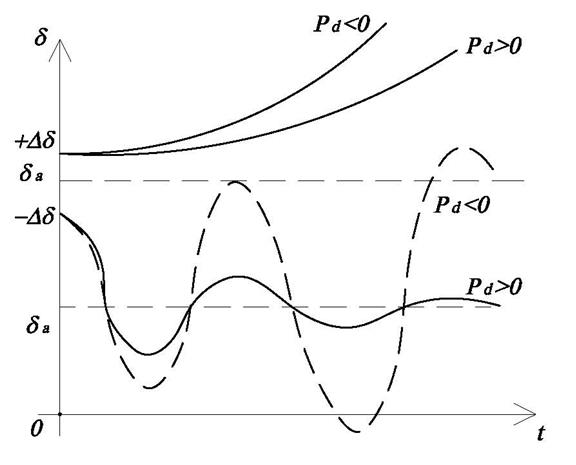
Рис.3.6. Характер переходного процесса при возмущениях
в точке ![]() при
при ![]() и
и
![]() .
.
Математические возрастающая часть характеристики
мощности ![]() от убывающей ее части отличается
тем, что на возрастающей части:
от убывающей ее части отличается
тем, что на возрастающей части:
 , а на убывающей
, а на убывающей  .
.
Следовательно, критерием статической устойчивости (математическим признаком) рассматриваемой системы (простейшей электропередачи) при отсутствии на генераторе АРВ является условие:
 ,
, ![]() . (3.3)
. (3.3)
Величина ![]() называется
синхронизирующей мощностью. В данном случае при угловой характеристике,
описываемой формулой:
называется
синхронизирующей мощностью. В данном случае при угловой характеристике,
описываемой формулой:
 имеем
имеем  . (3.4)
. (3.4)
(см. рис.3.1., где С1 – синхронизирующая мощность).
![]() может служить
характеристикой степени устойчивости режима. Это видно из следующего.
может служить
характеристикой степени устойчивости режима. Это видно из следующего.
![]() , если находимся
в точке
, если находимся
в точке ![]() и проведем касательную к кривой
и проведем касательную к кривой ![]() .
.
![]() ,
,  , (3.5)
, (3.5)
т.е. ![]() при некотором
заданном отклонении угла
при некотором
заданном отклонении угла ![]() (
(![]() ).
).
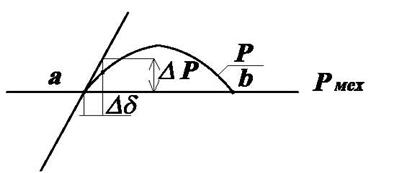
Рис.3.7. К определению ![]() .
.
![]() пропорциональна
пропорциональна
![]() при некотором заданном отклонении
при некотором заданном отклонении ![]() .
.
Если рассматривать возрастающую часть характеристики,
то величина ![]() характеризует собой силу,
стремящуюся вернуть ротор генератора в исходное положение, если он от него
отклоняется. И эта величина при заданном
характеризует собой силу,
стремящуюся вернуть ротор генератора в исходное положение, если он от него
отклоняется. И эта величина при заданном ![]() пропорциональна
синхронизирующей мощности. Только благодаря этим силам и возможна синхронная
работа генераторов в электрической системе. Отсюда и происходит название «синхронизирующая
мощность».
пропорциональна
синхронизирующей мощности. Только благодаря этим силам и возможна синхронная
работа генераторов в электрической системе. Отсюда и происходит название «синхронизирующая
мощность».
Величина ![]() зависит от
зависит от ![]() в исходном режиме, т.е. от активной
нагрузки генератора. Чем больше
в исходном режиме, т.е. от активной
нагрузки генератора. Чем больше ![]() , тем больше
, тем больше ![]() и тем меньше
и тем меньше ![]() ,
т.е. тем менее устойчив режим работы генератора.
,
т.е. тем менее устойчив режим работы генератора.
Рассматривалась простейшая электрическая передача без активных сопротивлений, но эти рассуждения будут справедливы при любом характере связи генератора с приемной системой, т.к. в любом случае угловая характеристика мощности имеет две ветви (возрастающую и убывающую).
Из рис.3.1 и 3.5 видно, что режим электропередачи при ![]() всегда устойчив, если
всегда устойчив, если ![]() (
(![]() -
исходный режим). Значит, для проверки статической устойчивости электропередачи
достаточно определить предел мощности
-
исходный режим). Значит, для проверки статической устойчивости электропередачи
достаточно определить предел мощности ![]() и
сравнить его с
и
сравнить его с ![]() , которую предполагается
передавать в приемную ЭЭС.
, которую предполагается
передавать в приемную ЭЭС.
Таким образом, критерий ![]() можно
заменить критерием
можно
заменить критерием ![]() , практически это удобнее,
чем пользоваться синхронизирующей мощностью. Но на практике желательно знать
еще и степень устойчивости режима (запас устойчивости).
, практически это удобнее,
чем пользоваться синхронизирующей мощностью. Но на практике желательно знать
еще и степень устойчивости режима (запас устойчивости).
Работать близко к пределу мощности нельзя, необходим запас. Во-первых, из-за неизбежной неточности расчетов и исходных данных. Кроме того, запас устойчивости необходим и для непредвиденных изменений режима приемной ЭЭС, приводящих к ухудшению устойчивости (% снижения напряжения на шинах ЭЭС).
О степени устойчивости режима можно судить по величине коэффициента запаса статической устойчивости:
 . (3.6)
. (3.6)
Чем выше ![]() , тем устойчивее
режим. Есть нормативы этого коэффициента. Нельзя допускать слишком низкого
запаса устойчивости (
, тем устойчивее
режим. Есть нормативы этого коэффициента. Нельзя допускать слишком низкого
запаса устойчивости (![]() ). По нормативам
). По нормативам ![]() должен быть не менее 0,2 (20%) в
нормальном режиме и не менее 0,08 (8%) в кратковременном послеаварийном режиме
до вмешательства обслуживающего персонала в регулирование режима.
должен быть не менее 0,2 (20%) в
нормальном режиме и не менее 0,08 (8%) в кратковременном послеаварийном режиме
до вмешательства обслуживающего персонала в регулирование режима.
Таким образом, практический расчет статической
устойчивости простейшей электропередачи сводится к определению предела мощности
![]() и затем коэффициента
и затем коэффициента ![]() . Кроме того, необходимо вычислить
. Кроме того, необходимо вычислить ![]() и проверить условие
и проверить условие ![]() (если нет АРВ).
(если нет АРВ).
Рис.3.8.К определению максисмума электропередачи.
Для определения ![]() необходимо
знать
необходимо
знать ![]() ,
, ![]() ,
, ![]() , эти параметры обычно заданы, затем
определить
, эти параметры обычно заданы, затем
определить ![]() :
:
 , (3.7)
, (3.7)
при отсутствии АРВ ![]() и
тогда
и
тогда ![]() :
:
 . (3.8)
. (3.8)
Это справедливо для простейшего случая: неявнополюсный генератор, нет АРВ, нет активных сопротивлений, электропередача последовательная.
1. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ (ДУ) ПРОСТЕЙШЕЙ СИСТЕМЫ
Динамическая устойчивость – устойчивость по отношению к большим возмущениям. Устойчивость системы к малым возмущениям (статическая устойчивость) еще вовсе не означает устойчивость ее к большим возмущениям режима (динамическая устойчивость).
Самыми опасными возмущениями с точки зрения устойчивости являются КЗ, поэтому динамическую устойчивость рассматривают при КЗ.
Рассмотрим простейшую систему вида:
Рис.4.1. Простейшая система (электропередача).
Время существования КЗ мало (0,06-0,3с) до отключения его выключателем с обеих сторон. Рассмотрим электромеханический переходный процесс при этом условии:
Если нет АРВ:
, (4.1)
если АРВ пропорционального действия:
 , (4.2)
, (4.2)
если АРВ сильного действия:
 . (4.3)
. (4.3)
При КЗ, учитывая, что переходная ЭДС ![]() (
(![]() )
измениться скачком не может, и постоянная времени затухания свободных
составляющих токов
)
измениться скачком не может, и постоянная времени затухания свободных
составляющих токов ![]() , а нас интересует интервал
времени
, а нас интересует интервал
времени ![]() , в этих условиях можно считать, что
, в этих условиях можно считать, что ![]() для машин без демпферных контуров.
для машин без демпферных контуров.
Но электромагнитные процессы в демпферных контурах
очень быстры, и ими можно пренебречь. Значит, из всех формул (4.1), (4.2) и
(4.3) можно взять (4.2), для простоты считая ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.