Лекция 6
(4 часа)
СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ САР
Понятие статических и астатических САР.
Порядок астатизма
Рассмотрим структурную схему САР, изображенную на рис.6.1.
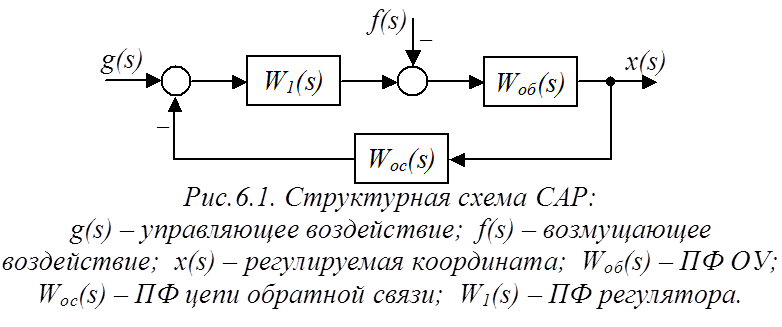
Задача – каким-то образом воспроизводить x(s) в соответствии с заданием g(s), уменьшив при этом (в идеале – исключив) влияние возмущения f(s) на регулируемую координату.
Напоминание. Статической называется система, в которой при наличии возмущения (нагрузки) присутствует ошибка регулирования, зависящая от его величины. В противном случае САР называется астатической. (Лекция 1)
Статизм и астатизм САР рассматривается раздельно применительно к управляющему g(s) и возмущающему f(s) воздействиям.
Для систем точного воспроизведения представляет интерес вопрос, является ли САР статической или астатической по управляющему воздействию. Если ошибка воспроизведения управляющего воздействия
![]()
в
установившемся режиме (при ![]() ) равна нулю, то
САР называется астатической по управляющему воздействию. В противном
случае САР называется статической.
) равна нулю, то
САР называется астатической по управляющему воздействию. В противном
случае САР называется статической.
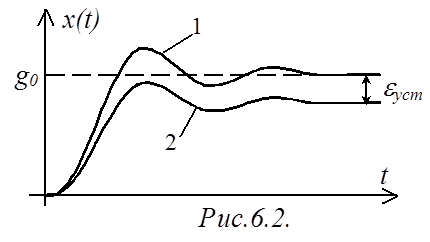 Рассмотрим приведенное определение применительно к
постоянному управляющему воздействию –
Рассмотрим приведенное определение применительно к
постоянному управляющему воздействию – ![]() (рис.6.2):
в случае 1
(рис.6.2):
в случае 1 ![]() – следовательно, САР астатическая; в
случае 2
– следовательно, САР астатическая; в
случае 2 ![]() отлична от нуля – САР статическая.
отлична от нуля – САР статическая.
Учитывая, что в системах могут иметь место самые
различные воздействия (см. рис. 4.4 – типовые воздействия), для астатических
систем вводится понятие порядка астатизма ![]() (
(![]() 1, 2, 3, …). Так, случаю 1 на рис.6.2
соответствует порядок астатизма по управляющему воздействию
1, 2, 3, …). Так, случаю 1 на рис.6.2
соответствует порядок астатизма по управляющему воздействию ![]() 1, случаю 2 –
1, случаю 2 – ![]() 0
(САР статическая).
0
(САР статическая).
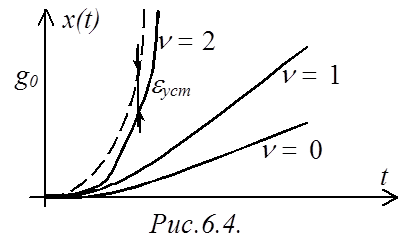
При линейно изменяющемся управляющем воздействии ![]() (рис.6.3) (кривая 1-го порядка)
ошибка в установившемся режиме будет равна нулю, если САР обладает порядком
астатизма
(рис.6.3) (кривая 1-го порядка)
ошибка в установившемся режиме будет равна нулю, если САР обладает порядком
астатизма ![]() по управляющему воздействию, при
по управляющему воздействию, при ![]() 1 в установившемся режиме будет иметь
место постоянная ошибка
1 в установившемся режиме будет иметь
место постоянная ошибка ![]() , отличная от
нуля. При
, отличная от
нуля. При ![]() 0 ошибка будет увеличиваться.
0 ошибка будет увеличиваться.
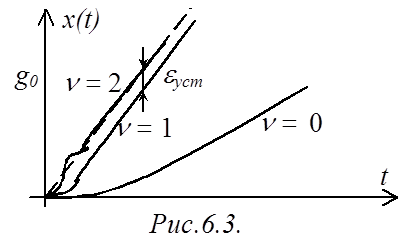 Аналогично вводится понятие астатизма
Аналогично вводится понятие астатизма ![]() 3 по управляющему воздействию при
квадратичном изменении управления
3 по управляющему воздействию при
квадратичном изменении управления ![]() (рис.6.4)
(кривая 2-го порядка) и т.д.
(рис.6.4)
(кривая 2-го порядка) и т.д.
Вопросом статизма или астатизма по отношению к возмущающему воздействию интересуются в системах стабилизации. Если возмущающее воздействие оказывает влияние на регулируемую координату в установившемся режиме, то система называется статической по возмущающему воздействию, в противном случае – астатической.
 Под статической характеристикой понимают
зависимость
Под статической характеристикой понимают
зависимость ![]() при постоянном управляющем
воздействии
при постоянном управляющем
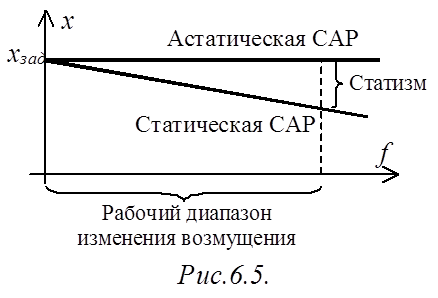
воздействии ![]() (рис.6.5). Для САР, астатической по
возмущению, статическая характеристика представляет собой прямую линию,
параллельную оси абсцисс.
(рис.6.5). Для САР, астатической по
возмущению, статическая характеристика представляет собой прямую линию,
параллельную оси абсцисс.
В технических САР в роли возмущения обычно выступает нагрузка силового агрегата, которая может изменяться в заранее установленном диапазоне (рабочем). При этом максимальное значение возмущения обычно имеет место в нормальном (номинальном) режиме работы САР. Величина ошибка регулируемой координаты в номинальном режиме работы называется статизмом.
Примечание. Одна и та же САР может быть астатической по отношению к управляющему воздействию, но статичной по отношению к возмущающему, и наоборот. Поэтому при использовании терминов статическая или астатическая всегда следует добавлять, по отношению к какому воздействию термин применяется.
Системы точного воспроизведения
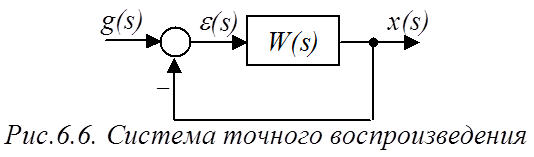
Обычно для таких систем ПФ цепи ОС равна единице:
![]() ,
,
т.е., вход равен выходу (рис.6.6).
 Для определения установившейся ошибки может быть
использована теорема о конечном значении (табл.2.2):
Для определения установившейся ошибки может быть
использована теорема о конечном значении (табл.2.2):
 .
.
Если окажется, что ![]() ,
САР является астатической, в противном случае – статической.
,
САР является астатической, в противном случае – статической.
Представим ПФ разомкнутой САР (рис.6.6) в виде:
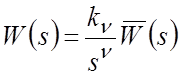 ,
,
где
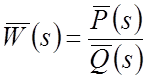 – нормированная ПФ разомкнутой САР,
где
– нормированная ПФ разомкнутой САР,
где ![]() .
.
![]() – порядок астатизма ПФ
разомкнутой системы;
– порядок астатизма ПФ
разомкнутой системы;
Система будет статической (![]() ),
если интегрирующие звенья в чистом виде отсутствуют, либо все они
скомпенсированы дифференцирующими. В противном случае САР будет астатической.
),
если интегрирующие звенья в чистом виде отсутствуют, либо все они
скомпенсированы дифференцирующими. В противном случае САР будет астатической.
Для определения установившейся ошибки необходимо найти ПФ, считая входом управляющее воздействие g(s), а выходом – сигнал ошибки e(s):
 . (1)
. (1)
Тогда установившаяся ошибка может быть вычислена следующим образом:
 . (2)
. (2)
В частном случае, при ![]() (постоянное
воздействие), когда
(постоянное
воздействие), когда ![]() , установившаяся ошибка
будет равна:
, установившаяся ошибка
будет равна:
 . (3)
. (3)
Из (3) видно, что САР будет астатической, если ![]() . В противном случае САР будет
статической. Но из (1) следует, что при
. В противном случае САР будет
статической. Но из (1) следует, что при ![]()
![]() , а при
, а при ![]()
 .
.
Таким образом, если ![]() ,
то САР будет статической, и установившаяся ошибка будет обратно пропорциональна
коэффициенту усиления
,
то САР будет статической, и установившаяся ошибка будет обратно пропорциональна
коэффициенту усиления ![]() разомкнутой САР,
сложенному с единицей.
разомкнутой САР,
сложенному с единицей.
Теоретически
ошибку можно приблизить к нулю, устремляя ![]() к
бесконечности. Это положение реализуется в релейных САР, релейные элементы
которых работают в скользящем режиме.
к
бесконечности. Это положение реализуется в релейных САР, релейные элементы
которых работают в скользящем режиме.
Система будет астатической, если порядок астатизма ПФ
разомкнутой системы ![]() . Таким образом, в
астатической САР всегда должны присутствовать интегрирующие звенья в чистом
виде (хотя бы одно) – то есть, не должны компенсироваться дифференцирующими
звеньями и не должны быть замкнутыми жесткими ОС.
. Таким образом, в
астатической САР всегда должны присутствовать интегрирующие звенья в чистом
виде (хотя бы одно) – то есть, не должны компенсироваться дифференцирующими
звеньями и не должны быть замкнутыми жесткими ОС.
Обратная связь является жесткой, если ![]() , если же
, если же ![]() ,
ОС является гибкой.
,
ОС является гибкой.
Если ![]() , то говорят, что
замкнутая САР является астатической 1-го порядка, если
, то говорят, что
замкнутая САР является астатической 1-го порядка, если ![]() –
астатической 2-го порядка и т.д.
–
астатической 2-го порядка и т.д.
Таким образом, порядок астатизма замкнутой САР по управляющему воздействию совпадает с порядком астатизма ПФ разомкнутой САР. Это видно из формулы (1).
Доказательство. Пусть имеется САР, ПФ которой по ошибке равна
 .
.
Пусть к САР приложено управляющее
воздействие (рис.4.4) ![]() , где
, где ![]() – порядок кривой.
– порядок кривой.
Изображение управляющего воздействия по Лапласу (табл.2.1):
 .
.
Вычисляем установившуюся ошибку по (2):

Из последнего
выражения следует, что ![]() при
при ![]() .
.
С помощью последней формулы можно определить
установившуюся ошибку при любых ![]() и
и ![]() . Так, частные случаи сведены в
табл.6.1.
. Так, частные случаи сведены в
табл.6.1.
Табл.6.1. Установившиеся ошибки ![]()
|
Воздействие |
|
|
|
|
|
Постоянное (n=0) |
|
0 |
0 |
0 |
|
Линейное (n=1) |
|
|
0 |
0 |
|
Парабола (n=2) |
|
|
|
0 |
|
|
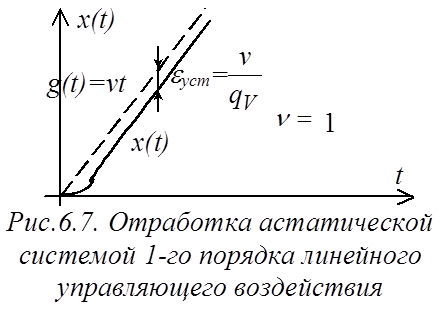
Таким образом, астатическая система 1-го порядка
(![]() ) отрабатывает линейно (n=1) возрастающий сигнал
) отрабатывает линейно (n=1) возрастающий сигнал ![]() –
сигнал, изменяющийся с постоянной скоростью
–
сигнал, изменяющийся с постоянной скоростью  , – с
ошибкой, прямо пропорциональной скорости изменения задающего воздействия
V, и обратно пропорциональной коэффициенту усиления
разомкнутой САР. В установившемся режиме (рис.6.7) регулируемая координата x(t) изменяется также с постоянной скоростью V.
, – с
ошибкой, прямо пропорциональной скорости изменения задающего воздействия
V, и обратно пропорциональной коэффициенту усиления
разомкнутой САР. В установившемся режиме (рис.6.7) регулируемая координата x(t) изменяется также с постоянной скоростью V.
 Величина, показывающая отношение скорости
изменения регулируемой координаты к ошибке в установившемся режиме, называется добротностью
САР по скорости, которая численно равна коэффициенту усиления
Величина, показывающая отношение скорости
изменения регулируемой координаты к ошибке в установившемся режиме, называется добротностью
САР по скорости, которая численно равна коэффициенту усиления ![]() разомкнутой САР:
разомкнутой САР:
![]() .
.
Аналогичным образом, астатическая система 2-го
порядка (![]() ) отрабатывает параболически (n=2) возрастающий сигнал
) отрабатывает параболически (n=2) возрастающий сигнал  –
сигнал, изменяющийся с постоянным ускорением
–
сигнал, изменяющийся с постоянным ускорением  , – с
ошибкой, прямо пропорциональной ускорению a, и обратно
пропорциональной коэффициенту усиления разомкнутой САР. В установившемся режиме
(рис.6.8) регулируемая координата x(t) изменяется также с постоянным ускорением a.
, – с
ошибкой, прямо пропорциональной ускорению a, и обратно
пропорциональной коэффициенту усиления разомкнутой САР. В установившемся режиме
(рис.6.8) регулируемая координата x(t) изменяется также с постоянным ускорением a.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.






