











































СОДЕРЖАНИЕ
Заданные показатели качества
Введение 5
1. Линеаризация нелинейностей 6
2. Структурная схема заданной части САУ 7
3. Выбор комплектного электропривода 10
4. Выбор способа подключения преобразователя к сети 11
5. Выбор сглаживающего дросселя 12
6. Расчет параметров заданной части САУ 13
7. Синтез системы подчиненного регулирования 14
8. Анализ системы подчиненного регулирования 17
9. Синтез цифрового регулятора скорости 26
10. Анализ САУ с цифровым регулятором 28
10.1 Стандартные Z – преобразования 28
10.2 Билинейные преобразования 41
Заключение 55
Библиография 56
Введение
Целью данного курсового проекта является выбор структуры и параметров системы автоматического управления так, чтобы удовлетворялись заданные требования к качеству регулирования. При этом имеется принципиальная схема заданной части САУ.
В ходе проектирования система будет синтезирована с помощью трех различных методов:
-метод подчиненного регулирования;
-синтез системы с цифровым регулятором скорости
Синтез системы с цифровым регулятором скорости будет осуществлен при помощи двух методов: стандартного Z-преобразования и билинейного преобразования. Каждая из таких систем будет рассмотрена при двух значениях периода прерывания.
Для каждого варианта синтеза будет проведен анализ полученной системы, который заключается в нахождении показателей качества САУ и сравнении их с требуемыми. В конце проекта будет помещена сравнительная таблица, в которой будут приведены результаты проектирования.
1. Линеаризация нелинейностей
Линеаризация тиристорного преобразователя заключается в выборе постоянного значения коэффициента передачи преобразователя согласно выражению
 ,
,
где: ЕТП – номинальная ЭДС преобразователя, В;
UУМ – макс. напряжение управления на входе преобразователя, В.
 .
.
Постоянная времени преобразователя назначается исходя из условия:
![]() с.
с.
принимаем: Тμ = 0,005с
2. Структурная схема заданной части САУ
2.1. Расчет датчика тока
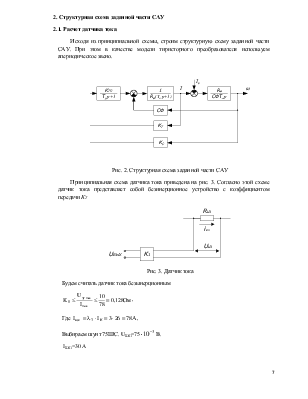
Исходя из принципиальной схемы, строим структурную схему заданной части САУ. При этом в качестве модели тиристорного преобразователя используем апериодическое звено.
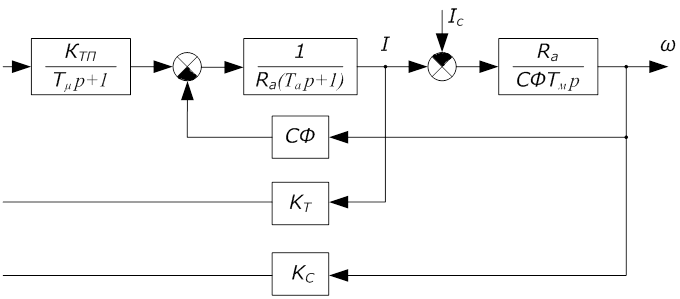
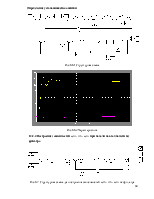
Рис. 2. Структурная схема заданной части САУ
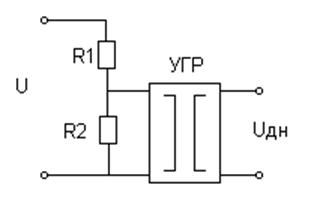
Принципиальная схема датчика тока приведена на рис. 3. Согласно этой схеме датчик тока представляет собой безинерционное устройство с коэффициентом передачи КТ
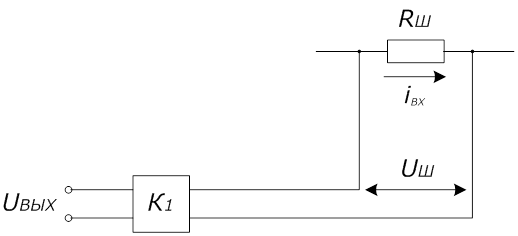
Рис. 3. Датчик тока
Будем считать датчик тока безынерционным
 ,
,
Где ![]() ,
,
Выбираем шунт 75ШС. UШН=75![]() В.
В.
IШН=30 A
Принимаем ![]()
Тогда 
Максимальное значение сигнала на выходе датчика тока
![]() .
.
2.2. Расчет датчика скорости
Принципиальная схема датчика скорости приведена на рис. 4. Пренебрегая индуктивностью якорной цепи тахогенератора, датчик скорости представляет собой безинерционное устройство с коэффициентом передачи КС
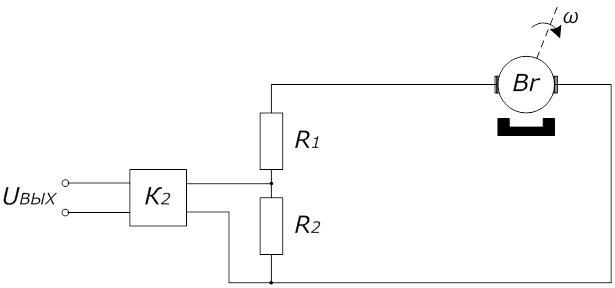
Рис. 4. Датчик угловой скорости вращения
Номинальная скорость вращения двигателя 
Выбираем тахогенератор ТГ-1, номинальная скорость
которого ![]()
![]()
Номинальное напряжение тахогенератора![]() .
.
Коэффициент передачи тахогенератора: 
Коэффициент обратной связи по скорости (коэффициент
датчика скорости) выбираем из условия 
Принимаем ![]()
Зададим значение сопротивления ![]() .
.
Тогда величину сопротивления можно определить из
условия: 
![]()
Принимаем ближайшее
большее стандартное значение: ![]() .
.
Уточняем коэффициент
делителя напряжения 
Определяем уточненное
значение коэффициента обратной связи по скорости: ![]()
Следовательно,
наибольшее значение сигнала обратной связи по скорости равно: ![]() не превышает 10 В.
не превышает 10 В.
3. Выбор комплектного электропривода
Исходя из условий  ,
т.е.
,
т.е.
Выбираем комплектный унифицированный трехфазный электропривод серии ЭПУ3 для привода станков с техническими данными
![]() ,
,
![]() ,
,
![]()
4. Выбор способа подключения преобразователя к сети
Определим необходимое напряжение питания комплектного электропривода.
Приняв ![]()
![]()
![]()
![]()
![]() находим:
находим:

Найденные значения напряжений существенно ниже величины напряжений сети 220В и 380В. Следовательно, используем согласующий силовой трансформатор.
Среди выпускаемых электротехнической промышленностью
трансформаторов есть трансформаторы с ![]()
Поэтому для дальнейшего расчета примем это значение вторичного напряжения трансформатора.
Габаритная мощность трансформатора
![]()
Следовательно, первичное напряжение выбираем равным ![]() .
.
Определим необходимый ток во вторичной обмотке трансформатора
![]()
Из табл. П.2.2 [ Технические и экономические расчеты в курсовых и дипломных проектах. Учебное пособие] выбираем трансформатор ТСП-16/0,7-УХЛ4 со следующими номинальными данными:
![]() ,
, ![]()
![]() ,
,
![]()
![]() ,
,
![]()
![]()
5. Выбор сглаживающего дросселя
Сопротивление обмоток трансформатора

Где 
![]()
Определяем индуктивность, вносимую в якорную цепь обмоткам трансформатора
Для определения ![]() вычислим
вычислим ![]()
Примем ![]()
Тогда 
Суммарная индуктивность якорной цепи, определяемая вкладом обмотки якоря двигателя и обмотками трансформатора, равная
![]() ,
,
где индуктивность обмотки якоря: ![]()
![]() значительно
превышает требуемое исходя из ограничения пульсаций тока якоря значение
индуктивности
значительно
превышает требуемое исходя из ограничения пульсаций тока якоря значение
индуктивности ![]() .
Следовательно, включение дополнительного сглаживающего дросселя не требуется.
.
Следовательно, включение дополнительного сглаживающего дросселя не требуется.
6. Расчет параметров заданной части САУ
сопротивление без нагрева Ra,200 =0,95
коэффициент для машин с компенсационной обмотки: b=0,25
Пересчитаем сопротивление при 20о в сопротивление при 75о
![]()

индуктивность обмотки якоря: ![]()
![]()
электромагнитная постоянная времени:  с
с
механическая постоянная времени:  с.
с.
7. Синтез системы подчиненного регулирования
При синтезе САУ используем общепринятое упрощение, заключающееся в пренебрежении влиянием внутренней обратной связи по противоЭДС двигателя. В этом случае структурная схема заданной части будет представлять собой последовательное соединение типовых звеньев и датчики обратных связей. Количество контуров регулирования следует выбрать равным количеству обратных связей, т.е. трем. При синтезе регуляторов соответствующих координат электропривода (напряжения, приложенного к якорю двигателя; тока якоря; угловой скорости вращения) использовать стандартную процедуру синтеза регуляторов системы подчиненного регулирования. Синтез САУ завершается оценкой необходимости компенсации влияния существующей в модели двигателя обратной связи по противоЭДС на переходные и установившиеся режимы работы системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.