 (10)
(10)
Рассмотрим частный случай, когда условия (5) выбраны в виде (6), а функционал (4) принят квадратичным. Тогда, для задачи оптимизации линейной системы, которая описывается уравнениями вида:
![]()
и квадратичного функционала:
Уравнения Эйлера-Лагранжа примут вид:
![]()
![]() (11)
(11)
![]()
![]()
Граничные условия для этой задачи можно выбрать в следующем виде:
![]()
![]()
Каждое из последних уравнений системы (11) имеет решение:
Если ![]() и
и ![]() для всех
для всех ![]() ,
то из равенства (6) следует:
,
то из равенства (6) следует:
![]()
![]()
И система (11) принимает вид:
![]()
![]()
что соответствует случаю, когда
на управление ![]() не накладывается
ограничений.
не накладывается
ограничений.
Если же ![]() ,
из равенства (6) следует:
,
из равенства (6) следует:
![]()
То есть управление ![]() достигает граничных условий.
достигает граничных условий.
Принцип максимума Л.С.Понтрягина в теории оптимальных систем
Принцип максимума определяет необходимые условия оптимальности управления в нелинейных управляющих системах. Он распространен и на случаи, когда на координаты состояния системы накладываются ограничения. Рассмотрим основную теорему принципа максимума и дадим более удобную формулировку оптимального управления.
Пусть оптимальное управление описывается системой нелинейных дифференциальных уравнений:

![]() (1)
(1)
или в векторной форме:
Здесь:
![]() -
-
![]() -мерный вектор состояния объекта
-мерный вектор состояния объекта
![]() -
-
![]() -мерный вектор управляющих
воздействий
-мерный вектор управляющих
воздействий
![]() -
функция правой части уравнения (1)
-
функция правой части уравнения (1)
Полагаем, что вектор управления
принимает значения из некоторой замкнутой области U r-мерного пространства управлений.
Положим, что функции ![]() непрерывны по всем
аргументам и имеют непрерывные производны по переменным состояния
непрерывны по всем
аргументам и имеют непрерывные производны по переменным состояния ![]() . Назовем допустимыми управлениями те
управления
. Назовем допустимыми управлениями те
управления ![]() , которые являются
кусочно-непрерывными функциями времени и принимают значения из множества U.
, которые являются
кусочно-непрерывными функциями времени и принимают значения из множества U.
Основная задача оптимального
управления формулируется следующим образом: среди всех допустимых управления,
приводящих изображающую точку в фазовом пространстве X из начального положения ![]() в
конечное
в
конечное ![]() , если эти управления существуют. И нужно
найти такие управления, для которых функционал:
, если эти управления существуют. И нужно
найти такие управления, для которых функционал:
 (2)
(2)
достигает минимума.
Введем новую переменную ![]() , которая определяется следующим
дифференциальным уравнениям:
, которая определяется следующим
дифференциальным уравнениям:
 (3)
(3)
Здесь ![]() -
подынтегральная функция функционала (2).
-
подынтегральная функция функционала (2).
Присоединив уравнение (3) к системе уравнений (1), получим:

![]() (4)
(4)
Запишем (4) в векторной форме.
Для этого введем в рассмотрение (n+1)-ый вектор
координат состояния: ![]() , тогда в векторной форме
записи это уравнение запишется следующим образом:
, тогда в векторной форме
записи это уравнение запишется следующим образом:
 (5)
(5)
Здесь:
![]()
вектор правых частей системы (5).
Заметим, что вектор-функция ![]() не зависит от координаты
не зависит от координаты ![]() вектора
вектора ![]() .
Обозначим через
.
Обозначим через ![]() точку с координатами
точку с координатами ![]() в (n+1)-ом
фазовом пространстве
в (n+1)-ом
фазовом пространстве ![]() . Пусть
. Пусть ![]() - некоторое допустимое управления,
для которого соответствующая фазовая траектория (1) проходит при
- некоторое допустимое управления,
для которого соответствующая фазовая траектория (1) проходит при ![]() через точку
через точку ![]() .
А при выполнении равенства
.
А при выполнении равенства ![]() через точку
через точку ![]() .
.
Из уравнения (2) следует, что координата определяется равенством:
Если ![]() ,
то будем иметь:
,
то будем иметь:
Таким образом, в пространстве ![]() фазовая траектория системы (5),
соответствующая тому же управлению
фазовая траектория системы (5),
соответствующая тому же управлению ![]() , проходит при
, проходит при ![]() через точку
через точку ![]() ,
а при
,
а при ![]() через точку
через точку ![]() .
Это иллюстрирует следующий рисунок:
.
Это иллюстрирует следующий рисунок:
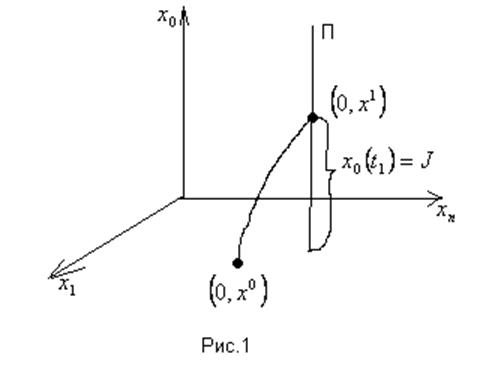
Обозначим через П прямую в
пространстве ![]() , проходящую через точку
, проходящую через точку ![]() и параллельную оси
и параллельную оси ![]() . Тогда основную задачу оптимально
управления можно сформулировать следующим образом:
. Тогда основную задачу оптимально
управления можно сформулировать следующим образом:
В (n+1)-мерном
пространстве ![]() заданы начальная точка
заданы начальная точка ![]() и прямая П, параллельная оси
и прямая П, параллельная оси ![]() и проходящую через точку
и проходящую через точку ![]() . Среди всех допустимых управлений,
обладающих тем свойством, что решение системы (5) с начальными условиями
. Среди всех допустимых управлений,
обладающих тем свойством, что решение системы (5) с начальными условиями ![]() проходит через точку прямой П,
необходимо выбрать такое управления, для которого координата точки
проходит через точку прямой П,
необходимо выбрать такое управления, для которого координата точки ![]() имело бы минимальное значение.
имело бы минимальное значение.
Сформулированная задача представляет собой задачу Майера на условный экстремум. Однако в силу ограничений, накладываемых на допустимое управление методами классического вариационного исчисления, эта задача не решается.
Формулировка теоремы, дающей необходимое условие экстремума:
Введем в рассмотрение
вспомогательные переменные ![]() , которые
удовлетворяю следующей системе уравнений:
, которые
удовлетворяю следующей системе уравнений:
![]() (6)
(6)
Система (6) называется
сопряженной по отношению к системе уравнений (5). Если выбрать некоторое
допустимое управление ![]() на отрезке
на отрезке ![]() и найти соответствующее ему решение
и найти соответствующее ему решение ![]() с заданными начальными условиями
с заданными начальными условиями ![]() , то при подстановки в систему
уравнений (6) управления
, то при подстановки в систему
уравнений (6) управления ![]() и решения
и решения ![]() , получим линейную однородную систему
уравнений:
, получим линейную однородную систему
уравнений:
![]() (7)
(7)
Система (7) удовлетворяет
условиям существования и единственности решения системы дифференциальных уравнений.
Системы уравнений (5) и (6) можно объединить одной формой записи, для этого
надо ввести в рассмотрение функцию H:
 (8)
(8)
Здесь:
![]()
Тогда системы (5) и (6) запишутся следующим образом:
![]() (9)
(9)
![]() (10)
(10)
Отметим, что вектор функций ![]() и
и ![]() непрерывны
всюду, кроме точек разрыва допустимого управления
непрерывны
всюду, кроме точек разрыва допустимого управления ![]() .
Эти вектор-функции имеют непрерывные производные. При фиксированных значениях
.
Эти вектор-функции имеют непрерывные производные. При фиксированных значениях ![]() и
и ![]() функция
H становится функцией только управления
функция
H становится функцией только управления ![]() .
.
Теорема 1
Пусть ![]() ,
когда
,
когда ![]() , такое допустимое управление, что
соответствующая ему траектория
, такое допустимое управление, что
соответствующая ему траектория ![]() , исходящая при
, исходящая при ![]() из точки
из точки ![]() ,
проходит в момент времени
,
проходит в момент времени ![]() через некоторую
прямую П. Для оптимальности управления
через некоторую
прямую П. Для оптимальности управления ![]() и
траектории
и
траектории ![]() необходимо существование такой
ненулевой непрерывной вектор-функции
необходимо существование такой
ненулевой непрерывной вектор-функции ![]() , которая
соответствует функциям
, которая
соответствует функциям ![]() и
и ![]() , что:
, что:
1. При
любом ![]() функция
функция ![]() достигает
по
достигает
по ![]() максимума, то есть справедливо
равенство:
максимума, то есть справедливо
равенство:
![]() (11)
(11)
2. В
конечный момент времени ![]() имеют место
соотношения:
имеют место
соотношения:
 (12)
(12)
Можно показать, то если
вектор-функции ![]() удовлетворят уравнениям (9)
и (10), то функции
удовлетворят уравнениям (9)
и (10), то функции ![]() и
и ![]() являются
постоянными, так что проверку условий (12) можно проводить в любой момент
времени их интервала
являются
постоянными, так что проверку условий (12) можно проводить в любой момент
времени их интервала ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.