СОДЕРЖАНИЕ
|
Задание 1 |
4 |
|
|
Задание 2 |
7 |
|
|
Заключение |
26 |
|
|
Литература |
27 |
|
|
Приложение А |
28 |
|
Задание 1
Определение передаточной функции системы управления, структурная схема которой представлена на рисунке 1
Рисунок 1 – Структурная схема СУ
Соединение блоков с передаточными функциями ![]() и
и ![]() представляет собой соединение с отрицательной
обратной связью.
представляет собой соединение с отрицательной
обратной связью.
Передаточная функция этих блоков ![]() будет
определяться по формуле
будет
определяться по формуле
 .
.
Блоки с передаточными функциями ![]() и
и ![]() представляет собой соединение с
положительной обратной связью.
представляет собой соединение с
положительной обратной связью.
Передаточная функция этих блоков ![]() будет
определяться по формуле
будет
определяться по формуле
 .
.
Передаточная функция всей системы будет определяться по формуле

При подстановке числовых значений передаточная функция системы примет вид
 .
.
Определение типов звеньев
1)Звено с передаточной функцией  –
апериодическое звено.
–
апериодическое звено.
Общий вид передаточной функции
 ,
,
где ![]() – коэффициент усиления данного звена;
– коэффициент усиления данного звена;
![]() – постоянная времени.
– постоянная времени.
Для данного звена коэффициенты
![]() ,
, ![]() .
.
2) Звено с передаточной функцией  –
апериодическое звено.
–
апериодическое звено.
Общий вид передаточной функции
,
где ![]() – коэффициент усиления данного звена;
– коэффициент усиления данного звена;
![]() – постоянная времени.
– постоянная времени.
Для данного звена коэффициенты
![]() ,
, ![]() .
.
3) Звено с передаточной функцией ![]() –
безынерционный усилитель.
–
безынерционный усилитель.
Общий вид передаточной функции
![]() ,
,
где ![]() –
коэффициент усиления данного звена;
–
коэффициент усиления данного звена;
Для данного звена коэффициент
![]() .
.
Определение дифференциального уравнения, которым описывается система
 ,
,
 ,
,
![]()
![]() .
.
Окончально дифференциальное уравнение примет вид
![]() .
.
Задание 2
Определение передаточной функции системы управления, структурная схема которой представлена на рисунке 2
Передаточная функция блока  .
.
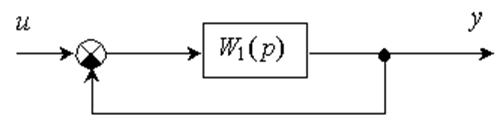
Рисунок 2 – Структурная схема системы управления
Передаточная
функция данной системы ![]() определяется по формуле
определяется по формуле
 ,
,
 .
.
Характеристический полином системы имеет вид
![]() .
.
Для определения полюсов системы решается уравнение (решение см. Приложение А)
![]() .
.
Полюса системы:
Расположение данных полюсов на комплексной плоскости представлено на рисунке 3.
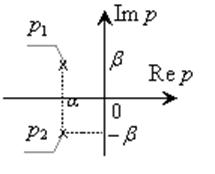
Рисунок 3 – Расположение комплексно-сопряженных полюсов системы
Определение временных характеристик системы
Изображение переходной характеристики определяется:
где ![]() – передаточная функция системы.
– передаточная функция системы.
Тогда для данной системы управления
Оригинал переходной характеристики определяется по формуле
 ,
,
где  – вычет подынтегральной функции,
– вычет подынтегральной функции, ![]() – полюсы подынтегральной функции.
– полюсы подынтегральной функции.
Таким образом, вычеты определяются:
 ;
;


Оригинал переходной характеристики имеет вид
 ,В
,В
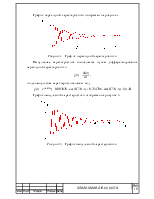
График переходной характеристики изображен на рисунке 4
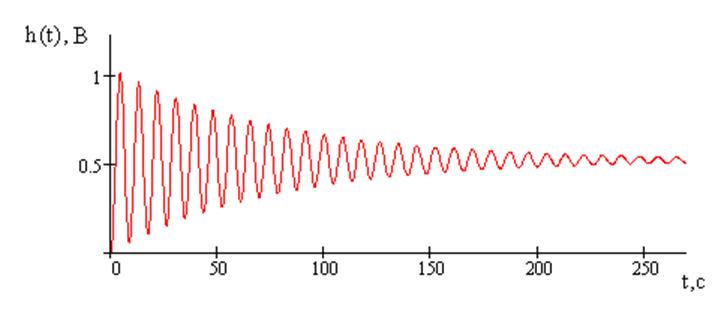
Рисунок 4 – График переходной характеристики
Импульсная характеристика вычисляется путем дифференцирования переходной характеристики
тогда импульсная характеристика имеет вид
![]() ,B
,B
График импульсной характеристики изображен на рисунке 5.
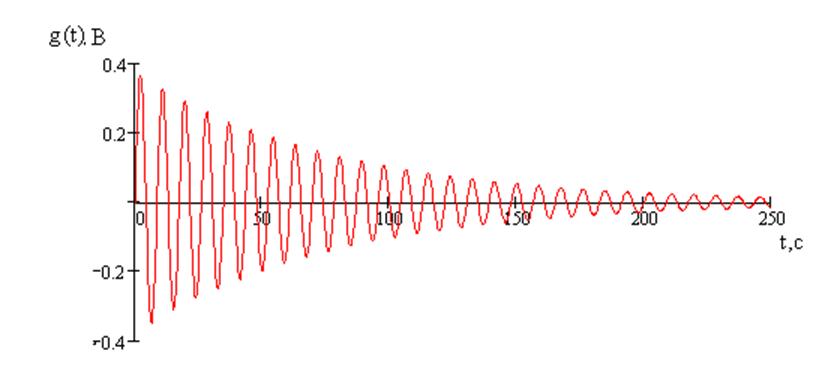
Рисунок 5 – График импульсной характеристики
Определение основных показателей качества переходного процесса по переходной характеристике
По графику переходной характеристики определяют прямые показатели качества.
1) перерегулирование σ – относительное значение первого выброса переходной характеристики, то есть.
 ,
,
 .
.
2) время переходного процесса tn – время, после которого выходной процесс не выходит за границы данной области
tn=250,3 с.
3) статическая ошибка ![]() – это ошибка в
установившемся режиме при действии на систему стационарного сигнала.
– это ошибка в
установившемся режиме при действии на систему стационарного сигнала.
 ,
,
где ![]() –
входной сигнал,
–
входной сигнал,
![]() – установившееся значение
переходного процесса.
– установившееся значение
переходного процесса.
![]()
Определить и построить частотные характеристики системы управления (АЧХ, ФЧХ, ЛАЧХ, ЛФЧХ, АЛАЧХ)
Передаточная функция системы управления имеет вид
Комплексный коэффициент передачи имеет вид
 ,
,


Исходя из полученного выражения, АЧХ и ФЧХ системы будут находиться:
 ,
,
 .
.
Графики АЧХ и ФЧХ изображены на рисунках 6 и 7, соответственно
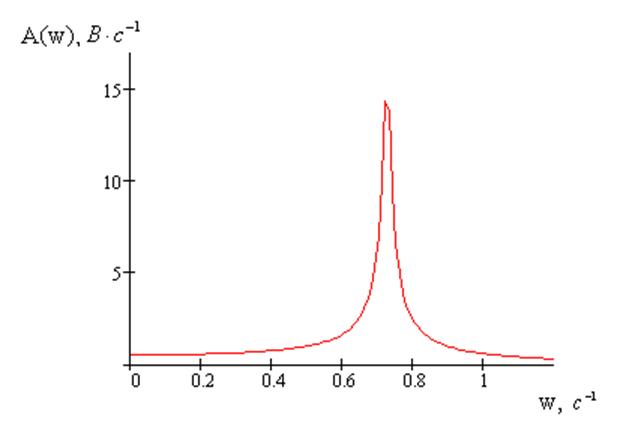
Рисунок 7 – График АЧХ
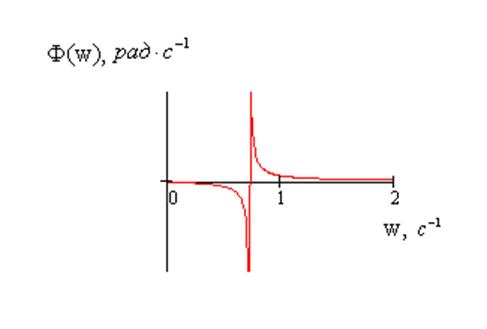
Рисунок 8 – График ФЧХ
ЛАЧХ определяется
![]() ,
,
при построении
графика по оси абсцисс откладывается ![]() .
.
График ЛАЧХ изображен на рисунке 9.
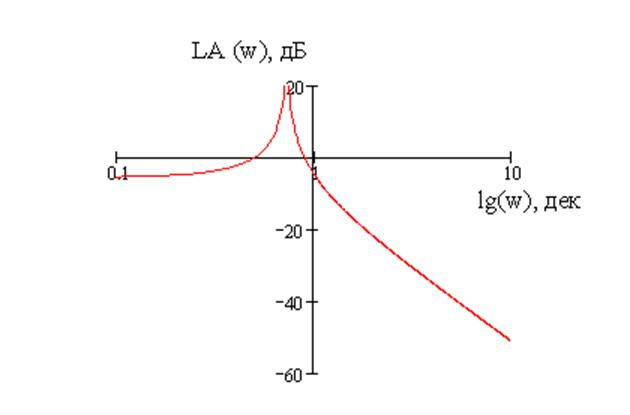
Рисунок 9 – График ЛАЧХ
Построение асимптотической логарифмической амплитудно-частотной
характеристики (АЛАЧХ). ![]()
Для этого нужно представить передаточную функцию в виде типового звена
Передаточная функция замкнутой системы управления имеет вид:
,
тогда преобразованная передаточная функция имеет вид:
Система представляет собой колебательное звено.
Коэффициент усиления звена  .
.
Определение частоты точки излома. Для этого необходимо найти значение постоянной времени звена:
![]() с,
с,
откуда
![]() с
с
Тогда значение частоты точки излома будет:
 ,
,
 рад/с.
рад/с.
Определение точки пересечения низкочастотной асимптоты через коэффициент усиления звена
 Дб.
Дб.
Колебательное звено дает наклон – 40 дБ/дек.
График АЛАЧХ изображен на рисунке 10.
Определение полосы пропускания
Определение полосы пропускания представлено на рисунке 11
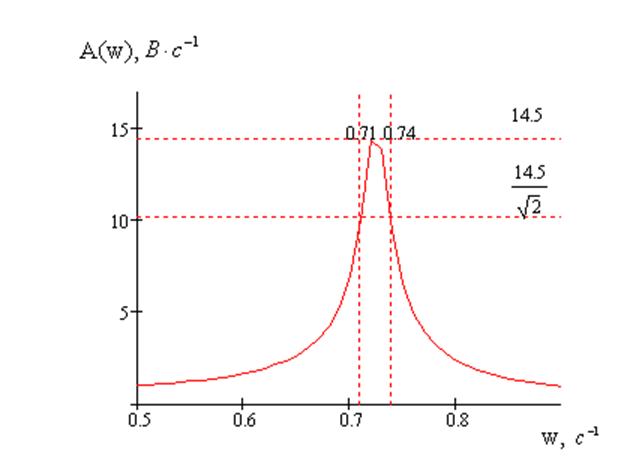
Рисунок 11 – Определение полосы пропускания
![]() –полоса пропускания
–полоса пропускания
Анализ устойчивости системы. Определение запасов устойчивости.
1. Корневой метод
Система имеет следующие полюса:
.
Расположение данных полюсов на комплексной плоскости представлено на рисунке 11.
Рисунок 12 – Расположение комплексно-сопряженных полюсов системы
Следовательно, система асимптотически устойчива, т.к. выполняется условие
![]() ,
,
то есть действительные части корней меньше нуля.
2. Метод Рауса-Гурвица
Характеристическое уравнение системы имеет вид
![]() .
.
Матрица Гурвица составляется из коэффициентов данного уравнения
 ,
,
 .
.
![]()
следовательно, система устойчива.
3. Критерий устойчивости Михайлова
Характеристический
полином системы управления ![]() имеет вид:
имеет вид:
![]() .
.
Характеристический комплекс можно получить путем замены аргумента ![]() чисто мнимой переменной
чисто мнимой переменной ![]() :
:
 .
.
![]() Вещественная и мнимая части:
Вещественная и мнимая части:
Годограф Михайлова изображен на рисунке 13.
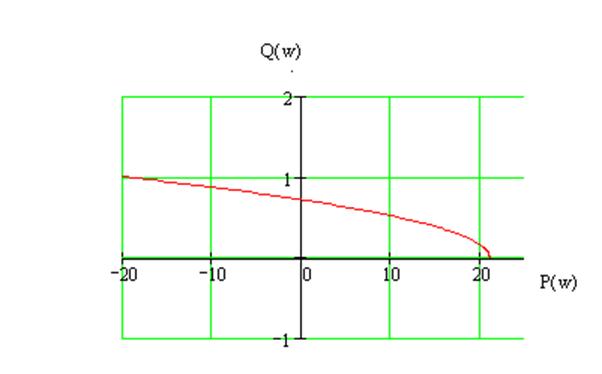
Рисунок 13 – Годограф Михайлова
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.