
Цель работы: получение навыков исследования линейных динамических моделей в программном пакете Matlab и ознакомление с временными и частотными характеристиками систем автоматического управления (САУ).
|
b0 |
b1 |
b2 |
a0 |
a1 |
a2 |
а3 |
|||
|
2. |
|
1. |
0 |
-3 |
2 |
4 |
2 |
3 |
9 |
|
2. |
8 |
0 |
-3 |
-4 |
-6 |
-4 |
-1 |
||
|
3. |
-4 |
6 |
-2 |
5 |
5 |
0 |
1 |
||
|
4. |
6 |
-8 |
-7 |
0 |
-6 |
-3 |
-1 |
||
|
5. |
2 |
-1 |
-3 |
-1 |
0 |
-7 |
-2 |
Вариант № 6
Выберем согласно таблице, приведенной выше и варианту передаточную функцию вида:
Преобразуем данную передаточную функцию в более удобный вид, домножив числитель и заменатль на -1:
Запишем передаточную функцию в командной строке программы Matlab при помощи функции tf. В итоге программа распознает введенные данные как передаточную функцию w(s):
>> w=tf([7 8 -6],[1 3 6 0])
Transfer function:
7 s^2 + 8 s - 6
-----------------------
1 s^3 + 3 s^2 + 6 s
Для определения полюсов передаточной функции введем команду pole(w)
>> pole(w)
ans =
0
- 1.5000 + 1.9365i
- 1.5000 - 1.9365i
Из результатов вычисления полюсов функции, отметим, что система находится на границе устойчивости. Это следует из корневого метода определения устойчивости. В данном случае вещественные части отрицательны, но один из корней имеет нулевую вещественную часть и мнимую части, т.е. лежит на мнимой оси.
Для определения нулей передаточной функции, запишем команду zero(w)
>> zero(w)
ans =
-1.6594
0.5165
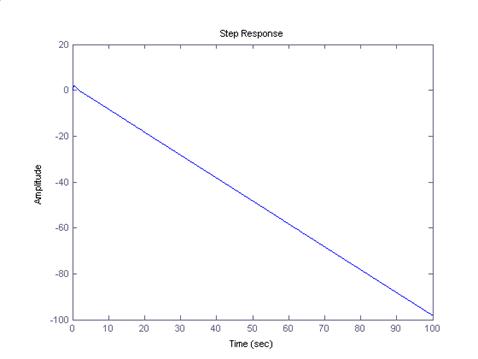
Для построения переходного процесса воспользуемся командой step (w)
>> step (w)
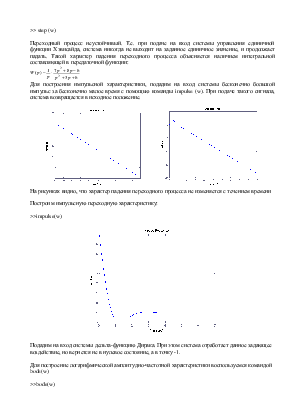
Переходный процесс неустойчивый. Т.е. при подаче на вход системы управления единичной функции Хэвисайда, система никогда не выходит на заданное единичное значение, и продолжает падать. Такой характер падения переходного процесса объясняется наличием интегральной составляющей в передаточной функции:
Для построения импульсной характеристики, подадим на вход системы бесконечно большой импульс за бесконечно малое время с помощью команды impulse (w). При подаче такого сигнала, система возвращается в исходное положение.
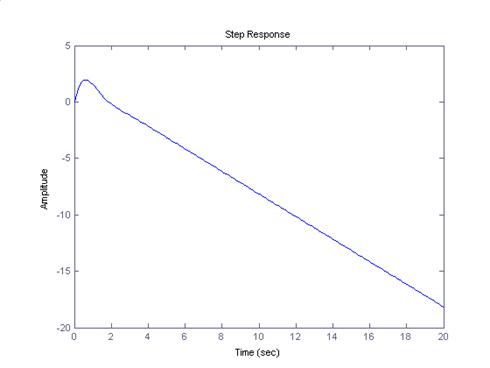
На рисунках видно, что характер падения переходного процесса не изменяется с течением времени
Построим импульсную переходную характеристику:
>>impulse(w)
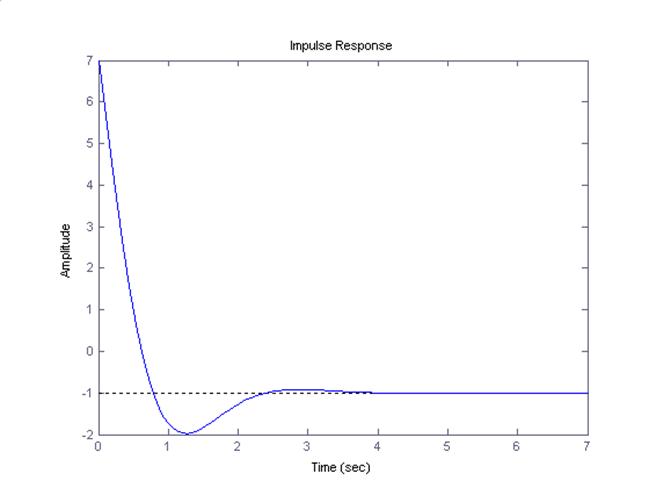
Подадим на вход системы дельта-функцию Дирака. При этом система отработает данное задающее воздействие, но вернется не в нулевое состояние, а в точку -1.
Для построение логарифмической амплитудно-частотной характеристики воспользуемся командой bode(w)
>>bode(w)
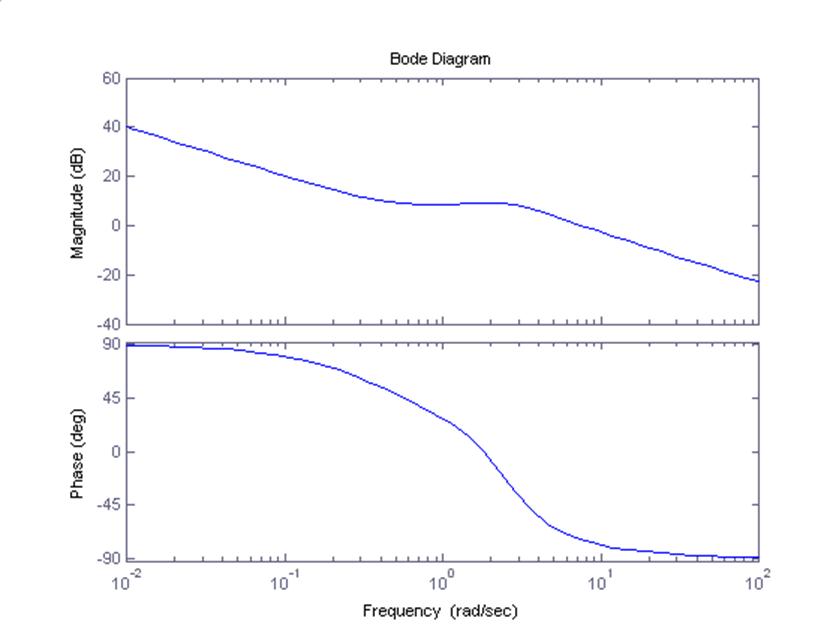
Судя по графику, ЛАЧХ пересекает линию 0 дб/дек, а ЛФЧХ – выше линии -180 градусов, что говорит о наличие запаса устойчивости по амплитуде, но отсутствии запаса по фазе.
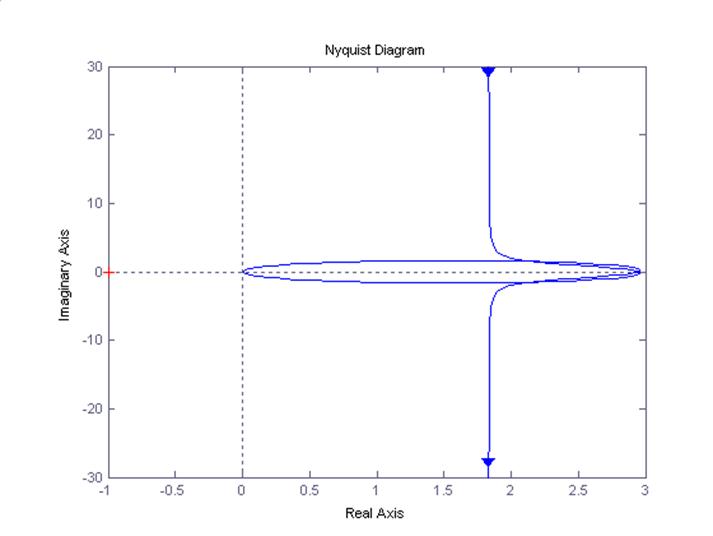
Для построение амплитудно-фазо-частотной характеристики АФЧХ или годографа Найквиста воспользуемся командой nyquist(w). Годограф не охватывает точку (-1, j0), что говорит о том, что после замыкания обратной связи данная система управления будет устойчивой, если в разомкнутом состоянии она тоже имеет устойчивый характер.
>> nyquist(w)
Вывод: система находится на границе
устойчивости и для того чтобы она стала устойчивой, необходимо ввести регулятор
(для компенсации интегральной составляющей требуется включит дополнительное
пропорционально-дифференцирующее звено ![]() )
)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.