6.Определение ошибки и её устранение.
При ![]()
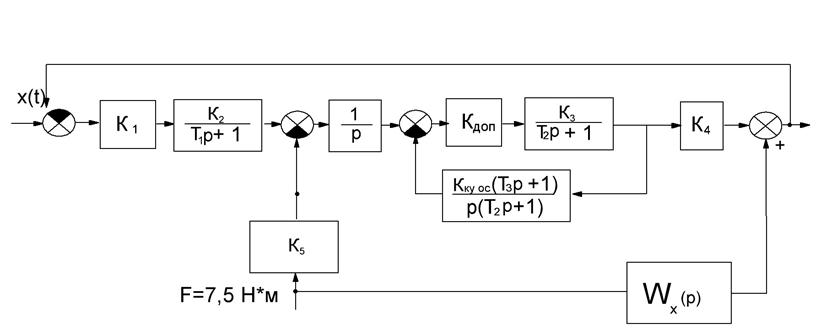
Система астатическая по задающему воздействию (в системе имеется интегратор), статическая относительно возмущения (интегрирующее звено расположено после точки приложения возмущения).
В системе возникает ошибка, которая складывается из ошибки по задающему воздействию и ошибки по возмущению:
![]() (1)
(1)
Где Сi- коэффициенты ошибок.
+
С0- статическая ошибка;
С1- коэффициент скоростной ошибки.
Изображение ошибки определяется по следующей формуле:
![]() (2)
(2)
Где ![]() - передаточная
функция по ошибке;
- передаточная
функция по ошибке;
![]() - передаточная
функция относительно возмущения;
- передаточная
функция относительно возмущения;
![]() - изображение
входного сигнала;
- изображение
входного сигнала;
![]() - изображение
возмущения.
- изображение
возмущения.
Передаточная функция замкнутого контура определяется следующим образом:
Тогда запишем передаточную функцию скорректированной системы, подставив найденную выше передаточную функцию замкнутого контура:

Находим передаточные функции по ошибке и относительно возмущения:
![]() (3)
(3)
 ;
;  .
.
Подставляем найденные передаточные функции, изображения входного сигнала и возмущения в формулу (3) и вычисляем значение ошибки.
Значение ошибки велико, поэтому для ее уменьшения используем специальные методы из теории инвариантности (независимость выходного сигнала то изменения задающего воздействия и возмущения).
В данном случае используем инвариантность относительно возмущения, поскольку составляющая часть ошибки по возмущению большая.
Для обеспечения инвариантности вводим второй канал передачи возмущения. Тогда система будет иметь следующую структуру:
|
Чтобы выходная переменная не зависела от возмущения,
надо чтобы передаточная функция, связывающая возмущение и выход была равна нулю![]() =0.
=0.
Запишем передаточную функцию, связывающую возмущение и выход, и приравняем ее к нулю:
 , где
, где ![]() - передаточная функция замкнутого
контура.
- передаточная функция замкнутого
контура.
![]() ,
, ![]() ,
, 
Дробь равна нулю, когда числитель равен нулю:
Тогда
 .
.
Если это условие выполняется, то инвариантность будет обеспечена.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.