Рис. 4.1 – Структурная схема модели с рассчитанными коэффициентами
4.2 Переходные процессы спроектированного электропривода
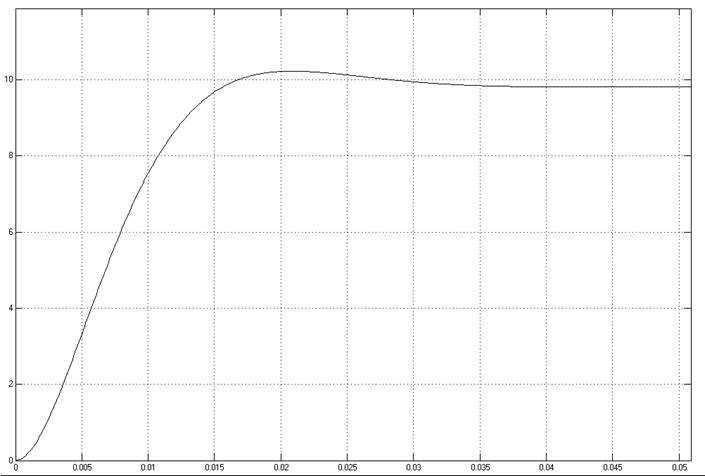
Рис. 4.2 – График переходного процесса тока при использовании двойного регулятора тока без компенсации ЭДС двигателя
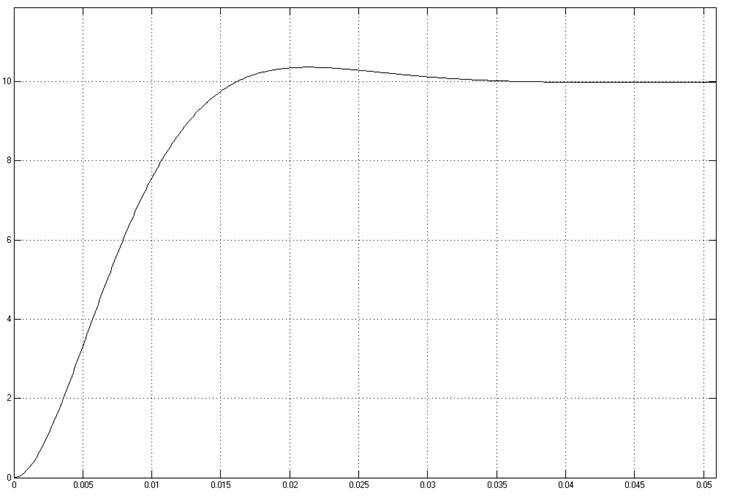
Рис. 4.3 – График переходного процесса тока при использовании двойного регулятора тока с компенсацией ЭДС двигателя
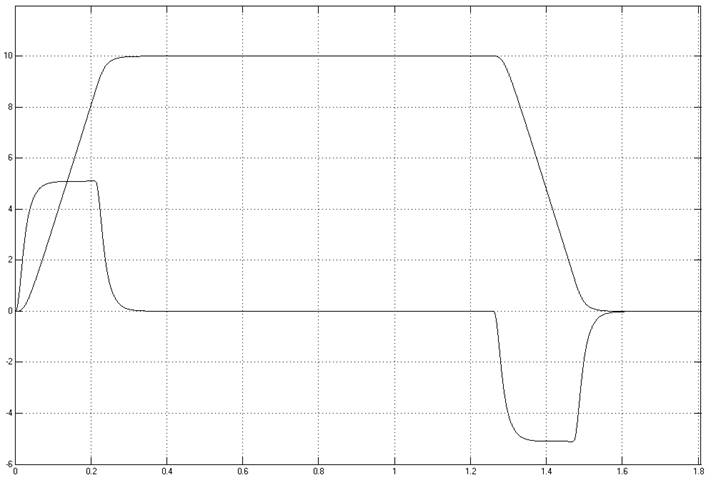
Рис. 4.4 – Графики скорости (ЭДС) и тока при пуске на холостом ходу без фильтра с П – регулятором ЭДС и двойным регулятором тока
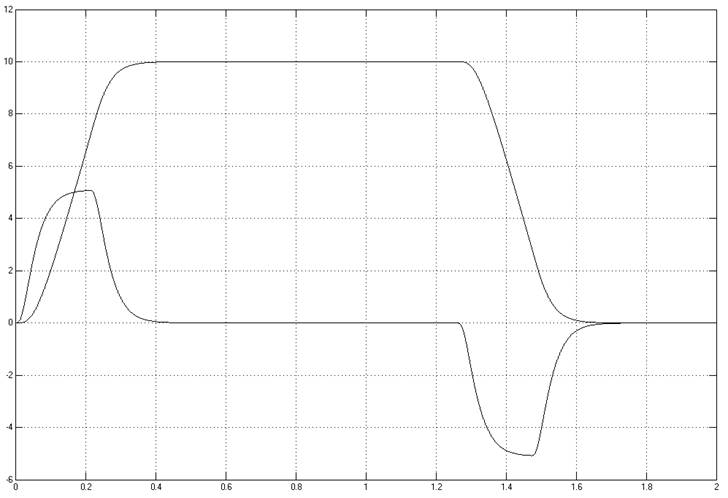
Рис. 4.5 – Графики скорости (ЭДС) и тока при пуске на холостом ходу с фильтром, с П – регулятором ЭДС и двойным регулятором тока
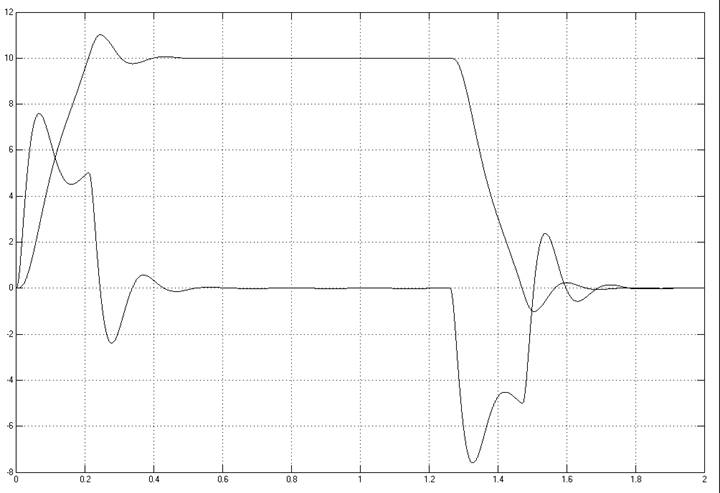
Рис. 4.6 – Графики скорости (ЭДС) и тока при пуске на холостом ходу без фильтра с ПИ – регулятором ЭДС и двойным регулятором тока
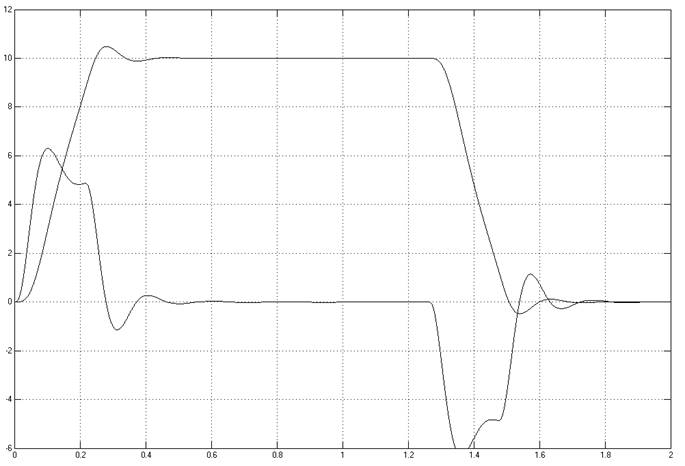
Рис. 4.7 – Графики скорости (ЭДС) и тока при пуске на холостом ходу с фильтром,
с ПИ – регулятором ЭДС
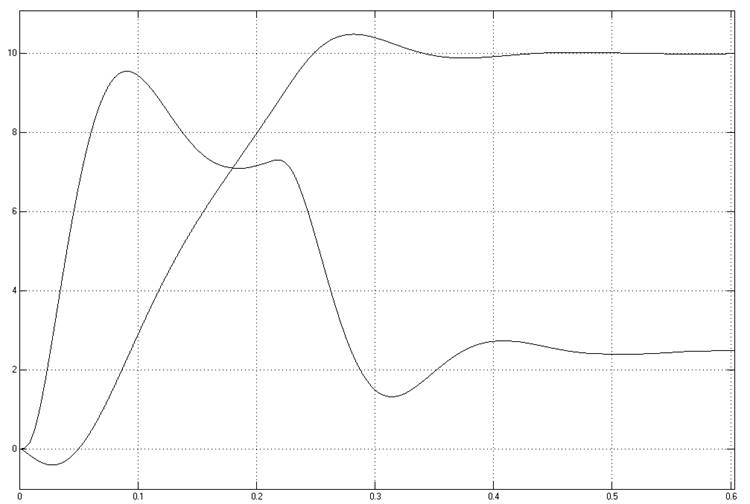
Рис. 4.8 – Графики скорости (ЭДС) и тока при пуске под нагрузкой с фильтром,
с ПИ – регулятором ЭДС
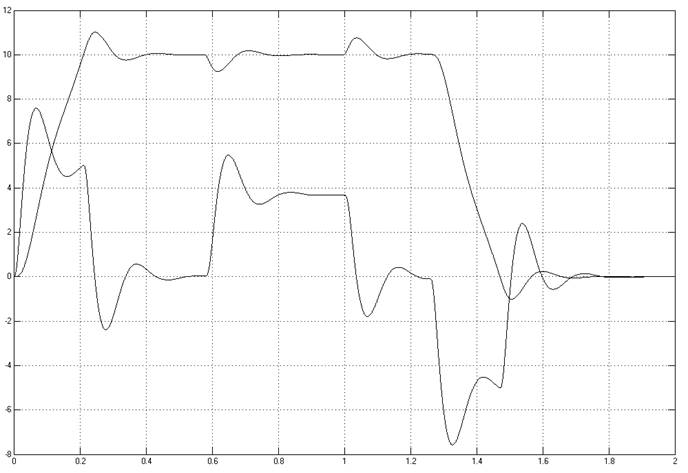
Рис. 4.9 – Графики переходных процессов при разгоне, работе на установившейся скорости, набросе и сбросе нагрузки и торможении без фильтра
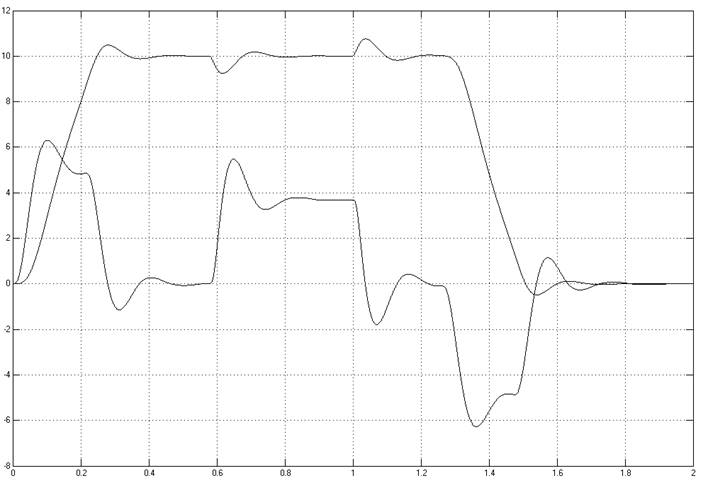
Рис. 4.10 – Графики переходных процессов при разгоне, работе на установившейся скорости, набросе и сбросе нагрузки и торможении с фильтром
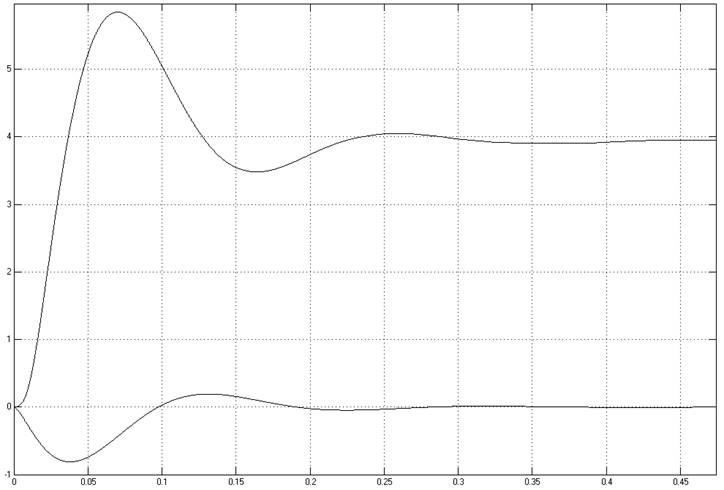
Рис 4.12 – Графики скорости (ЭДС) и тока, с фильтром,
с ПИ – регулятором ЭДС, при приложении нагрузки (Uзс = 0)
4.3 Определение основных показателей качества регулирования
Время разгона электропривода определяется динамическим током при разгоне, который в данном случае равен 1,2 от номинального тока двигателя. Разработанная САР поддерживает этот динамический ток, поэтому время разгона и торможения на холостом ходу и под нагрузкой всегда одинаковое и равно 0,5 с. Ограничение ускорения привода необходимо для предотвращения выхода из строя механической части привода и безискровой коммутации двигателя.
Ошибка регулирования скорости при набросе и сбросе нагрузки отсутствует, так как был использован ПИ – регулятор ЭДС, интегральная составляющая которого сводит эту ошибку к нулю.
Переходные процессы тока при набросе и сбросе нагрузки затухают за 0,28 с.
Перерегулирование тока при набросе и сбросе нагрузки составляет ![]() .
.
Для сохранения настройки САР на модульный оптимум в режиме прерывистых токов, используется двойной регулятор тока, который в свою очередь состоит из двух регуляторов: интегрального РТ2 и пропорционального РТ1, при этом регулятор РТ1 обеспечивает передаточную функцию фильтра с максимальным быстродействием, а регулятор РТ2 обеспечивает настройку на модульный оптимум.
Заключение
В данном курсовом проекте была разработана система автоматического регулирования скорости электропривода постоянного тока.
По номинальным данным электропривода был выбран реверсивный тиристорный преобразователь и рассчитаны его характеристики. В соответствии с заданием, особенностями объекта регулирования и с учётом действия возмущающих воздействий была разработана структурная схема СПРК. Внутренний контур регулирования якорного тока содержит двойной регулятор тока, настроенный на модульный оптимум. Контур регулирования ЭДС содержит ПИ – регулятор ЭДС, также отвечающий настройке на модульный оптимум.
В программе Matlab - Simulink были рассчитаны переходные процессы для разгона, рабочей скорости, торможения на холостом ходу, с набросом и снятием нагрузки. Графики переходных процессов соответствуют требованиям задания, что является одним из критериев правильности выполнения расчетов.
Разработанная САР была реализована на операционных усилителях.
Список использованных источников
1. Косматов В.И. Проектирование электроприводов металлургического производства: Методические указания к курсовому проекту по курсу ТЭП. Магнитогорск: МГМА, 1998.
2. Комплектные тиристорные электроприводы: Справочник/под ред. В.М.Перельмуттера. М.:Энергоатомиздат, 1988.
3. Косматов В.И. Проектирование электроприводов металлургического производства: Методические указания к курсовому проекту по курсу ТЭП. Магнитогорск: МГМА, 1998.
4. Бычков В. П. Электропривод и автоматизация металлургического производства. М.:Высшая школа, 1977.
5. В. М. Терехов, О. И. Осипов. Системы управления электроприводов. М.:Издательский центр «Академия», 2006.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.