 с, где Uнэ = 10 В – напряжение на выходе нелинейного элемента.
с, где Uнэ = 10 В – напряжение на выходе нелинейного элемента.
2.2 Построение контура регулирования ЭДС
2.2.1 Контур регулирования ЭДС, оценка заданной точности регулирования ЭДС
Контур регулирования ЭДС двигателя состоит из регулятора ЭДС, замкнутого контура регулирования якорного тока, обратной связи по ЭДС двигателя с датчиком ЭДС. Обратная свзяь по ЭДС осуществляется только тогда, когда нет возможности использовать тахогенератор для обратной связи по скорости.
В данном курсовом проекте выбираем быстродействующий датчик с постоянной
времени ![]() (из пункта 2.2.2).
Тогда просадка скорости при пропорциональном регуляторе ЭДС скорости находится
по формуле
(из пункта 2.2.2).
Тогда просадка скорости при пропорциональном регуляторе ЭДС скорости находится
по формуле
![]()
Относительная просадка скорости
![]() .
.
![]() , значит
требуется использование ПИ – регулятора ЭДС, чтобы свести ошибку к заданному
значению.
, значит
требуется использование ПИ – регулятора ЭДС, чтобы свести ошибку к заданному
значению.
Коэффициент регулятора ЭДС
![]()
Передаточная функция регулятора скорости

Так как в числителе регулятора скорости есть форсирующее звено, то это приведет к увеличению перерегулирования тока. Для компенсации на вход регулятора скорости ставится фильтр, имеющий передаточную функцию
![]() .
.
Структурная схема контура регулирования ЭДС представлена на рис. 2.5.
Напряжение с выхода регулятора ЭДС не должно превышать 10 В (что соответствует I = 2,5∙Iн ) , поэтому в обратную связь регулятора ЭДС ставится блок ограничения БО

Рис. 2.5 – Структурная схема контура регулирования ЭДС
2.2.2 Выбор датчика ЭДС, реализация обратной связи по ЭДС
При применении систем с обратной связью по ЭДС возникают сложности в реализации самого датчика ЭДС. Это связано с тем, что большинство главных приводов обжимных станов работают с ослаблением магнитного потока и датчик ЭДС имеет инерционное звено с постоянной времени якорной цепи. В тех случаях когда невозможно измерить непосредственно регулируемую координату, применяют датчики косвенного типа, которые выделяют регулируемую координату косвенным методом на основании непосредственно измеряемых координат и математической зависимости выделяемой координаты от измеряемой. Датчик косвенного измерения ЭДС якоря использует сигналы датчика тока якоря и датчика напряжения на якоре двигателя. Связь между током якоря, напряжением якоря и ЭДС якоря устанавливает уравнение электрического состояния равновесия в якорной цепи.
Выбираем быстродействующий датчик ЭДС, имеющий передаточную функцию
![]()
где ![]() - постоянная времени
датчика ЭДС ;
- постоянная времени
датчика ЭДС ;
![]() - коэффициент обратной связи по ЭДС.
- коэффициент обратной связи по ЭДС.
2.2.3 Задатчик интенсивности скорости
Для обеспечения заданного ускорения электропривода применяют задатчик интенсивности скорости.
В данном случае динамический ток равен ![]() , поэтому требуемое
ускорение электропривода определится следующим образом
, поэтому требуемое
ускорение электропривода определится следующим образом
![]() .
.
Тогда постоянная времени задатчика интенсивности скорости определится по формуле
![]() .
.
Структурная схема задатчика интенсивности скорости приведена на рисунке 2.6
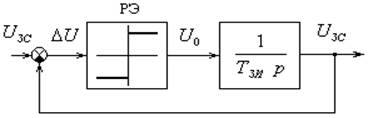
Рис. 2.6 - Структурная схема задатчика интенсивности скорости
3. Реализация САР
3.1 Принципиальная схема САР. Общая характеристика основных элементов системы
Принципиальная электрическая схема САР представлена на рисунке 3.1. Она разработана на основе структурной схемы спроектированной системы регулирования. Передаточные функции регуляторов реализуются на базе операционных усилителей с дифференциальным входом. В схеме используются резисторы общего назначения типа МЛТ и конденсаторы типа К. Расчет элементов схемы приводится ниже.
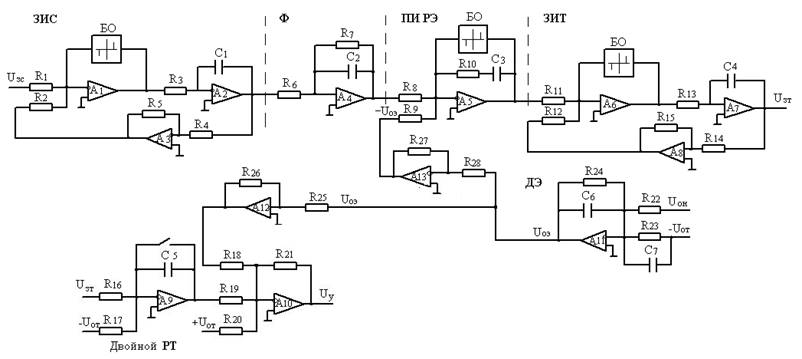
Рис. 3.1 – Принципиальная схема САР на операционных усилителях
3.2. Расчет контура регулирования якорного тока
Исходя из рассчитанной постоянной времени интегрирования внешнего регулятора тока РТ2, производится его реализация на операционном усилителе (рис. 3.2).
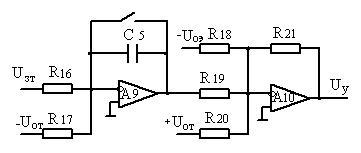
Рисунок 3.2 – Принципиальная схема двойного регулятора тока
Пусть ![]() =30 кОм тогда для
минимизации погрешности от токов смещения принимается
=30 кОм тогда для
минимизации погрешности от токов смещения принимается
![]() =
=![]() =30 кОм,
=30 кОм,
![]() =
=![]()
![]() , где
, где ![]() =
=![]() с – постоянная
интегрирования РТ1.
с – постоянная
интегрирования РТ1.
Теперь необходимо реализовать внутренний регулятор тока РТ1 (пропорциональный рис. 2.2). Величина Крт была определена ранее
![]() , поэтому,
предварительно задавшись
, поэтому,
предварительно задавшись ![]() ,
определяется величина сопротивления
,
определяется величина сопротивления ![]()
![]() кОм,
кОм,
Из стандартного
ряда выбирается резистор ![]() кОм.
кОм.
3.3 Расчёт элементов контура регулирования ЭДС
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.