Схема контура регулирования ЭДС стоит из задатчика интенсивности скорости, фильтра, компенсирующего форсирующую составляющую регулятора ЭДС, и самого регулятора ЭДС. Схема контура регулирования скорости реализованная на операционных усилителях представлена на рисунке 3.3.
Пропорционально-интегральный регулятор скорости реализован на операционном усилителе А5 (рис.3.4)
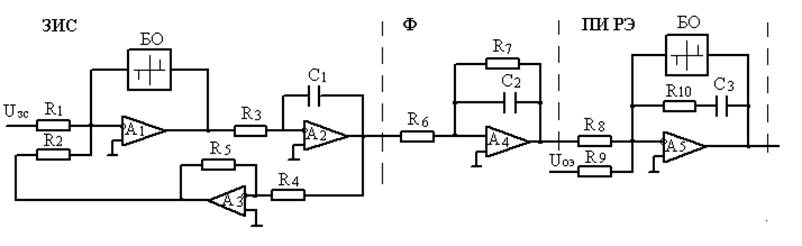
Рис. 3.3 – Схема контура регулирования ЭДС
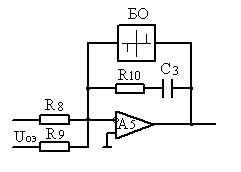
Рис. 3.4 - Схема реализации ПИ-регулятора ЭДС
Передаточная функция регулятора ЭДС

Принимаем С3 = 1 мкФ, тогда
 .
.
Из стандартного ряда сопротивлений Е24 принимаем ![]()
Сопротивление ![]()
Сопротивление R10 найдем как
![]()
Из стандартного ряда сопротивлений Е24 принимаем ![]()
Напряжение с выхода регулятора ЭДС не должно превышать 10 В, поэтому в обратную связь регулятора ЭДС ставится блок ограничения БО.
Фильтр с передаточной функцией ![]() реализован
на операционном усилителе А4 (рис. 3.5).
реализован
на операционном усилителе А4 (рис. 3.5).
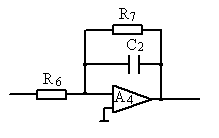
Рис. 3.5 – Схема реализации фильтра
Передаточная функция фильтра
![]() .
.
Пусть ![]() .
И так как
.
И так как ![]() , то
, то ![]() .
.
Сопротивление ![]() (из
стандартного ряда сопротивлений Е24).
(из
стандартного ряда сопротивлений Е24).
Как было сказано выше, для реализации обратной связи по ЭДС выбираем быстродействующий датчик ЭДС, схема реализации которого представлена на рис. 3.6.
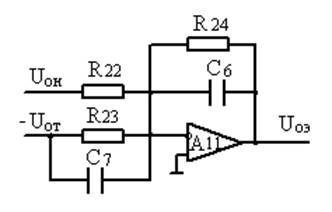
Рис. 3.6 – Быстродействующий датчик ЭДС
Передаточная функция датчика ЭДС
![]()
Примем ![]() Так
как
Так
как
![]()
Следовательно
![]()
Из стандартного ряда E24
сопротивлений выбираем ![]()
Так как
![]() , где
, где ![]() ;
;
![]() ;
;
![]()
Следовательно
![]()
Из стандартного ряда E24
сопротивлений выбираем ![]()
Так как
![]() .
.
Найдем ![]()
![]()
Из стандартного ряда E24
сопротивлений выбираем ![]()
Известно, что ![]() Отсюда
найдем емкость
Отсюда
найдем емкость ![]()
![]()
Из стандартного ряда E24 емкостей выбираем ![]()
3.4 Расчёт элементов задатчика интенсивности скорости
На входе регулятора ЭДС (перед фильтром) устанавливается задатчик интенсивности скорости. Реализация ЗИСа представлена на рис. 3.7. Задатчик интенсивности скорости ЗИС строится на трех операционных усилителях (А1, А2, А3).
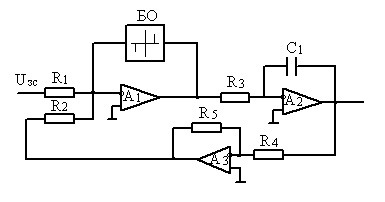
Рис. 3.7 – Схема реализации задатчика интенсивности скорости
Сопротивления R1, R2, R5, R4 принимаются одинаковыми и равными 15 кОм.
Исходя из того, что ![]() ,
и принимая
,
и принимая ![]() , найдем
, найдем ![]()
![]() .
.
Из
стандартного ряда сопротивлений Е24 принимаем ![]()
3.5 Расчёт элементов задатчика интенсивности тока.
На входе двойного регулятора тока устанавливается задатчик интенсивности тока. Реализация ЗИТ представлена на рис. 3.8. Задатчик интенсивности тока ЗИт строится на трех операционных усилителях (А6, А7, А8).
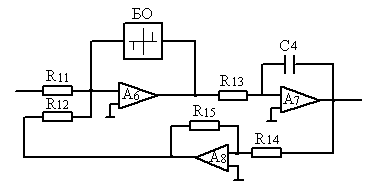
Рис. 3.8 – Схема реализации задатчика интенсивности тока
Сопротивления R1, R2, R5, R4 принимаются одинаковыми и равными 15 кОм.
Исходя из того, что ![]() , и принимая
, и принимая ![]() , найдем
, найдем ![]()
![]() .
.
Из стандартного ряда сопротивлений Е24 принимаем ![]()
3.6 Расчёт элементов компенсирующего звена.
При проверки влияния внутренней обратной связи по ЭДС двигателя была установлена необходимость устранить влияние противоЭДС, для этого вводится положительная обратная связь по ЭДС двигателя. Реализация звена компенсации ЭДС представлена на рис. 3.9.
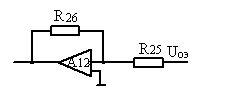
Рис. 3.9 – Схема реализации звена компенсации ЭДС
Передаточная функция компенсирующего звена
![]() .
.
Величина К была определена ранее
![]() , поэтому,
предварительно задавшись
, поэтому,
предварительно задавшись ![]() ,
определяется величина сопротивления
,
определяется величина сопротивления ![]()
![]() кОм,
кОм,
Из стандартного
ряда выбирается резистор ![]() кОм.
кОм.
4. Анализ динамических и статических режимов спроектированного электропривода
4.1 Статические характеристики спроектированного электропривода. Модель САР спроектированного электропривода
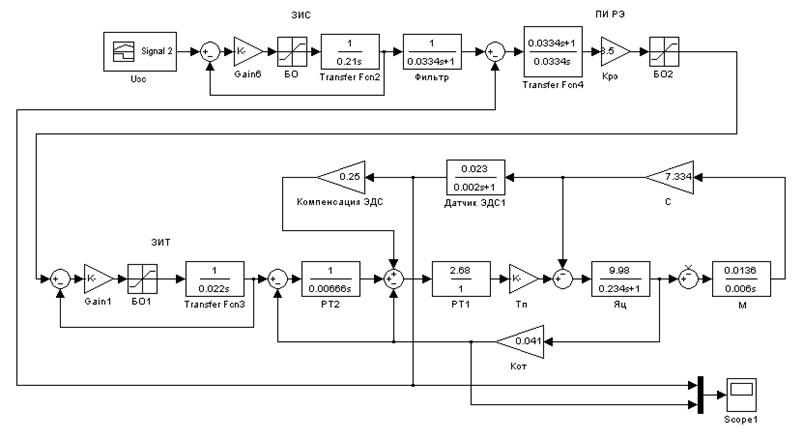
Расчёт переходных процессов необходим для оценки динамических и статических характеристик спроектированной САР стабилизации скорости электропривода. Наиболее точный и полный анализ динамики САР производится на ЭВМ с использованием системы автоматизированного моделирования Matlab (Simulink). Структурная схема исследуемой системы представлена на рис. 4.1.
Структурная схема СПРК включает в себя два контура регулирования. Внутренний контур регулирования якорного тока содержит двойной регулятор тока, настроенный на максимальное быстродействие. Контур регулирования ЭДС содержит пропорционально- интегральный регулятор ЭДС.
В программе Matlab (Simulink) были рассчитаны переходные процессы для режимов разгона, рабочего хода, торможения привода на холостом ходу, с набросом и снятием нагрузки и под нагрузкой.
Графики расчёта переходных процессов приведены ниже.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.