Задание № 8
Тема. Механизм насоса двойного действия
Насос предназначен для перекачивания жидкости при прямом и обратном ходе поршня 5 (рис. 1), который приводится в движение шестизвенным кривошипно-коромысловым механизмом, состоящим из кривошипа 1, шатунов 2 и 4, коромысла 3 и стойки 6.
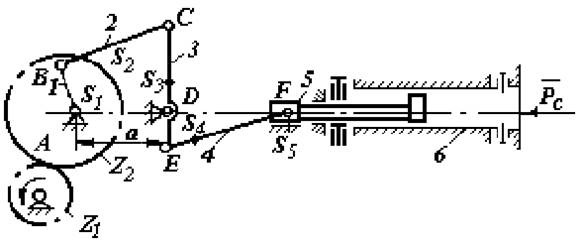
Рис. 1. Схема механизма
При движении
поршня слева направо в правой полости цилиндра происходит увеличение давления и
при ![]() (верхняя
ветвь индикаторной диаграммы) жидкость через нижний клапан нагнетается в сеть.
В левой части полости одновременно идет процесс всасывания через верхний клапан
при давлении 0,1
(верхняя
ветвь индикаторной диаграммы) жидкость через нижний клапан нагнетается в сеть.
В левой части полости одновременно идет процесс всасывания через верхний клапан
при давлении 0,1 ![]() ниже
атмосферного (нижняя линия индикаторной диаграммы). При обратном движении
поршня в правой части полости цилиндра открывается верхний клапан и происходит
всасывание при давлении 0,1
ниже
атмосферного (нижняя линия индикаторной диаграммы). При обратном движении
поршня в правой части полости цилиндра открывается верхний клапан и происходит
всасывание при давлении 0,1 ![]() ниже
атмосферного (нижняя линия индикаторной диаграммы), а в левой открывается
нижний клапан и происходит нагнетание в сеть (верхняя линия индикаторной
диаграммы).
ниже
атмосферного (нижняя линия индикаторной диаграммы), а в левой открывается
нижний клапан и происходит нагнетание в сеть (верхняя линия индикаторной
диаграммы).
Силу полезного
сопротивления ![]() определить
по рис. 3. Сила сопротивления всегда противоположна скорости движения
поршня-ползуна 5.
определить
по рис. 3. Сила сопротивления всегда противоположна скорости движения
поршня-ползуна 5.
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1. Произвести структурный анализ механизма.
2. Проверить возможность существования кривошипа при заданных размерах четырехзвенника АВСD.
3. Найти и построить положения звеньев, соответствующие крайним положениям ползуна 5, и определить его максимальное перемещение. Одно из крайних положений, соответствующее началу рабочего хода, взять для дальнейших расчетов за начальное.
4. Построить 12 положений звеньев механизма и траекторию движения центра тяжести звена 2.
5. Определить в 12 положениях построением планов скорости и в 6 положениях ускорения точек B, C, E, F и центров тяжести подвижных звеньев.
Положение центров тяжести звеньев 2, 4 принять в середине звеньев, звена 3 – на 0,4 его длины от точки D, звена 5 – в центре шарнира F.
6. Построить графики перемещений, скорости и ускорения ползуна Fпо углу поворота кривошипа.
7. Построить годограф скорости центра тяжести звена FE.
Графическую часть выполнить на листе формата А1. Исходные данные взять согласно номеру варианта.
СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
1. В одном из рабочих положений механизма подсчитать силы инерции и моменты от сил инерции, используя данные кинематического анализа.
2. В этом же положении построением планов сил определить силы реакций во всех кинематических парах механизма и уравновешивающую силу. Последнюю приложить в точке B перпендикулярно AB. Силу полезного сопротивления определить по рис. 3.
3. Определить уравновешивающую силу с помощью рычага Жуковского. Расхождение в полученных результатах при определении уравновешивающей силы построением плана сил и рычагом Жуковского не должно превышать 2 – 3 %.
4.
Определить потребную мощность
двигателя для привода насоса, если коэффициент полезного действия ![]() .
.
Графическую часть выполнить на листе формата А1.
ПРОЕКТИРОВАНИЕ ЗУБЧАТОЙ ПЕРЕДАЧИ
1. Проверить проектируемую передачу на подрезание. Применить неравносмещенное зацепление. Рассчитать размеры эвольвентного зацепления.
2. Построить картину зацепления.
3. Определить рабочие участки профилей, дугу зацепления и коэффициент перекрытия.
4. Построить эпюры относительного скольжения профилей зубьев.
5. Рассчитать размеры и построить картину зацепления малого колеса Ζ1 с инструментальной рейкой без ее сдвига.
Графическую часть выполнить на листе формата А1.
ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
1. Закон движения толкателя принять косинусоидальным ( рис. 2.).
2. По исходным данным построить графики перемещений, первой и второй производной перемещений толкателя по углу поворота кулачка.
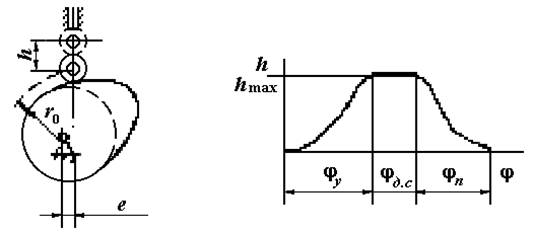
Рис. 2. Схема и циклограмма кулачкового механизма.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.