· Реализация такого итерационного процесса на каждой итерации обращает в нуль максимальный недиагональный элемент матрицы.
Матрицей вращения называется матрица вида
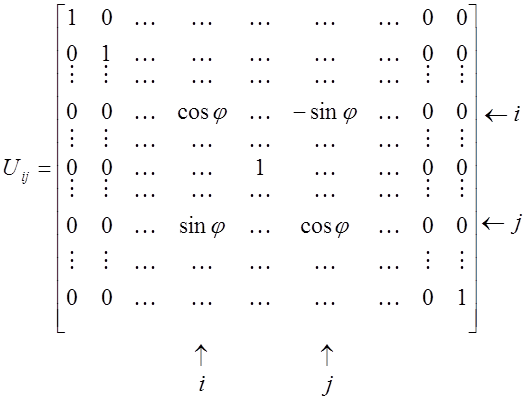 ,
,
то есть это единичная матрица, у которой
на указанных местах стоят косинусы и синусы. Название “матрица
вращения” связано с тем, что
в пространстве ![]() матрица является матрицей
преобразования декартовых координат при повороте осей на угол
матрица является матрицей
преобразования декартовых координат при повороте осей на угол ![]() . Непосредственным умножением можно
убедиться, что
. Непосредственным умножением можно
убедиться, что ![]() .
.
В итерационном методе вращения строится бесконечная последовательность подобных преобразований с помощью матриц вращения так, чтобы в пределе исходная матрица преобразовалась к диагональному виду.
Предположим, что на некоторой k-й итерации построена матрица ![]() .
Выбираем в ней максимальный по модулю внедиагональный элемент
.
Выбираем в ней максимальный по модулю внедиагональный элемент ![]() . Далее определяем угол преобразования
из уравнения
. Далее определяем угол преобразования
из уравнения
|
|
(5.4) |
По индексам i и j и углу ![]() строим матрицу вращения
строим матрицу вращения ![]() и выполняем преобразование матрицы
и выполняем преобразование матрицы ![]() . В результате получаем новую матрицу
. В результате получаем новую матрицу
![]() , отличающуюся от матрицы
, отличающуюся от матрицы ![]() только элементами строк и столбцов с
номерами i и j.
только элементами строк и столбцов с
номерами i и j.
Выпишем соотношения для вычисления
элементов матрицы, введя для упрощения промежуточную матрицу ![]() . Для элементов i-го
и j-го столбца имеем:
. Для элементов i-го
и j-го столбца имеем:
|
|
(5.5) |
Все остальные элементы ![]() для
для ![]() и
и
![]() . Теперь умножим
. Теперь умножим ![]() слева на
слева на ![]() и
получим матрицу
и
получим матрицу ![]() . Для элементов i-й
. Для элементов i-й
и j-й строк имеем:
|
|
(5.6) |
Все остальные элементы ![]() для
для ![]() и
и
![]() .
.
Можно показать, что в построенном процессе все внедиагональные элементы матрицы при достаточном числе преобразований становятся сколь угодно малыми.
Собственные векторы являются столбцами
матрицы  Здесь через K
обозначено число вращений.
Здесь через K
обозначено число вращений.
Контроль правильности вычислений на каждой
итерации можно вести путем проверки сохранения следа матрицы ![]() . Следом матрицы называется величина
. Следом матрицы называется величина  . Тогда если
. Тогда если ![]() сильно
отличается от
сильно
отличается от ![]() , то при переходе от
, то при переходе от ![]() к
к ![]() были
допущены ошибки или велика
были
допущены ошибки или велика
погрешность вычислений.
Алгоритм поиска
максимального
по модулю собственного числа
Пусть
матрица A неотрицательна. Обозначим максимальное по модулю
собственное число матрицы A через ![]() и соответствующий собственный вектор
через
и соответствующий собственный вектор
через ![]() . Из курса линейной алгебры известно,
что число
. Из курса линейной алгебры известно,
что число ![]() совпадает с одной из норм матрицы A, т.е.
совпадает с одной из норм матрицы A, т.е.  , где
, где  .
.
Тогда алгоритм поиска ![]() имеет вид
имеет вид
1.
задать ![]() ;
;
2. 
Теорема. Существуют пределы ![]() и
и ![]() для
любого
для
любого
начального приближения ![]() . При этом
. При этом ![]() ,
, ![]() .
.
Выбор
начального приближения не представляет сложности, в качестве ![]() можно выбрать, например, вектор, у
которого все компоненты
можно выбрать, например, вектор, у
которого все компоненты
нулевые, а одна компонента равна единице.
Тема 6. Численное дифференцирование
Основные вопросы темы
1. Постановка задачи и дифференцирование многочлена Ньютона.
2. Безразностные формулы численного дифференцирования.
3. Применение ряда Тейлора для численного дифференцирования.
Задача численного дифференцирования
возникает при нахождении производных от функции ![]() ,
заданной таблично, либо при нахождении производных от аналитической функции,
непосредственное дифференцирование которой по каким-либо причинам затруднено.
Важное приложение численного дифференцирования – разностная аппроксимация
производных, которая широко используется при численном решении дифференциальных
уравнений.
,
заданной таблично, либо при нахождении производных от аналитической функции,
непосредственное дифференцирование которой по каким-либо причинам затруднено.
Важное приложение численного дифференцирования – разностная аппроксимация
производных, которая широко используется при численном решении дифференциальных
уравнений.
Общий подход к задаче численного
дифференцирования состоит
в замене функции ![]() некоторой приближающей, легко
вычисляемой функцией
некоторой приближающей, легко
вычисляемой функцией ![]() ,
, ![]() ,
где
,
где ![]() – остаточный член приближения.
Полагают, что
– остаточный член приближения.
Полагают, что ![]() , а
, а ![]() –
погрешность вычисления производной.
–
погрешность вычисления производной.
Наиболее распространенным является случай,
когда в качестве приближающей функции ![]() выбирается
интерполяционный многочлен. При этом производные соответствующих порядков легко
определяются дифференцированием многочлена, а погрешность дифференцирования – дифференцированием
остаточного члена или погрешности интерполяции, которая, согласно формуле
(4.12), равна
выбирается
интерполяционный многочлен. При этом производные соответствующих порядков легко
определяются дифференцированием многочлена, а погрешность дифференцирования – дифференцированием
остаточного члена или погрешности интерполяции, которая, согласно формуле
(4.12), равна
Для вывода
формул численного дифференцирования удобно пользоваться многочленом в форме
Ньютона, так как он содержит разделенные разности, являющиеся аналогами
производных соответствующих порядков. Очевидно, что минимальное число узлов для
получения k-й производной равно ![]() ,
так как дальнейшее дифференцирование многочлена степени k приводит
к производной, равной нулю.
,
так как дальнейшее дифференцирование многочлена степени k приводит
к производной, равной нулю.
Представим функцию в виде
![]()
Тогда
Для равноотстоящих узлов с шагом h имеем:
![]()
Таким образом, точность расчета производной при заданной степени многочлена уменьшается с увеличением порядка производной. При решении практических задач в основном приходится использовать аппроксимации первых и вторых производных. Значительно реже приходится аппроксимировать производные более высоких порядков.
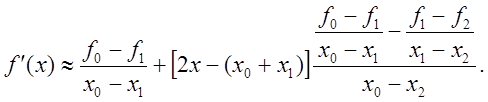
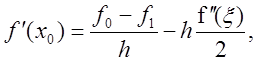
Вычислим производную первого порядка с использованием многочленов первого и второго порядка:
|
|
(6.1) |
|
|
(6.2) |
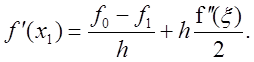
При вычислении производной по формуле
(6.1) максимальна ошибка в крайних точках отрезка ![]() и
минимальна в середине. Погрешности
и
минимальна в середине. Погрешности
в точках ![]() и
и ![]() равны
равны

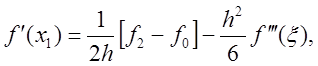
Согласно выражению (6.2) производная ![]() не является постоянной на отрезке
не является постоянной на отрезке ![]() . При равноотстоящих узлах
максимальная погрешность имеет место в
крайних точках, а минимальная – в средней, при этом ошибка
дифференцирования равна
. При равноотстоящих узлах
максимальная погрешность имеет место в
крайних точках, а минимальная – в средней, при этом ошибка
дифференцирования равна

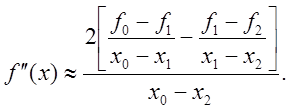
Вторая производная на отрезке ![]() является постоянной, равной
является постоянной, равной
|
|
(6.3) |
Погрешность вычисления второй производной имеет вид

По-прежнему максимальная погрешность в
вычислении имеет место
в крайних точках и минимальна в точке ![]() ,
но не равна нулю, поскольку мы имеем дело только с приближенными формулами.
Отметим, что точки
,
но не равна нулю, поскольку мы имеем дело только с приближенными формулами.
Отметим, что точки ![]() являются точками
повышенной точности при вычислении производной k-го
порядка.
являются точками
повышенной точности при вычислении производной k-го
порядка.
Безразностные формулы численного дифференцирования
Если принять узлы равноотстоящими и шаг
сетки равным h,
то из формул (6.1), (6.2) можно получить
выражения для вычисления производной в узлах.
По формуле (6.1) производные в точках ![]() и
и ![]() равны
равны
|
|
(6.4) |
|
|
(6.5) |
По формуле (6.2) производные в точках ![]() ,
, ![]() ,
, ![]() равны
равны
|
|
(6.6) |
|
|
(6.7) |
|
|
(6.8) |
Вторые производные в точках ![]() ,
, ![]() ,
, ![]() равны
равны
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.