На раме установлены направляющие, по которым передвигается суппорт с резаками. Суппорт - это сварная рама с закреплёнными на нём держателями резаков. Рама снабжена четырьмя вертикально расположенными катками, опирающимися на направляющие МГКР. Для удержания суппорта от перекоса в горизонтальном положении предусмотрены четыре боковых катка с вертикальными осями. Передвижение суппорта осуществляется при помощи реечной пары. Привод с ведущей шестерней установлен на суппорте. Ведущая шестерня привода обкатывается по зубчатой рейке, закреплённой на одной из направляющих рамы МГКР.
На рис.2 изображена упрощённая кинем-ская схема мех-ма передвижения суппорта:
w - угловая скорость вращения якоря двигателя, рад/с
Мс – момент сопротивления, действующий на валу двигателя, Н·м
Jдв – момент инерции, приложенный к валу двигателя, кг·м2
wвш - угловая скорость вращения ведущей шестерни, рад/с
Мвш – момент сопротивления, действующий на валу ведущей шестерни, Н·м
Jвш – момент инерции, приложенный к валу ведущей шестерни, кг·м2
h1 – КПД механической передачи редуктора
h2 – КПД механической передачи ведущая шестерня – зубчатая рейка
u - скорость передвижения суппорта, м/с
Fтр – сила сопротивления движению суппорта, обусловленная силами трения
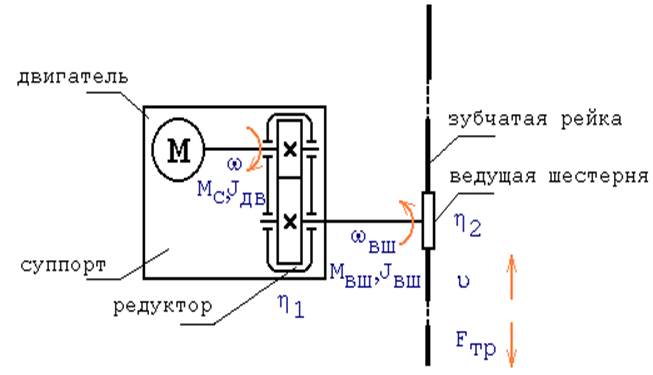
Рис. 2
3.Расчетная схема механической части электропривода.
На основании изучения кинематической схемы электропривода перемещения суппорта МГКР делаем вывод о том, что производственный механизм можно представить в виде одномассовой системы (жесткого приведенного механического звена). Упругие свойства механической системы можно не учитывать, так как она не содержит длинных канатов, длинных валопроводов и других упругих элементов. Для получения расчетной схемы необходимо определить приведенное значение момента сопротивления и приведенное значение момента инерции. Расчетная механическая схема электропривода соответствует приведению момента сопротивления и моментов инерции к валу двигателя.
Момент сопротивления обусловливается силой трения скольжения в подшипниках ходовых колес, силой трения качения ходовых колес по рельсам, а также трением реборд ходовых колес о рельсы, возникающим вследствие возможного перекоса конструкции.
Сила трения скольжения в основном вызывается механическим зацеплением между неровностями поверхностей тел и сцеплением между молекулами обоих тел в областях непосредственного соприкосновения. В приближенных расчетах можно считать, что сила F трения скольжения прямо пропорциональна силе N нормального давления между поверхностями трущихся тел (закон Амонтона):
где µ – безразмерный коэфф. трения скольжения, зависящий от свойств материала тел.
При качении по плоской поверхности тел, имеющих форму круглых цилиндров или шаров, возникают не только упругие, но и пластические деформации. Поэтому линия действия реакции R плоскости не совпадает с линией действия силы N нормального давления (рис. 3). Нормальная к плоскости составляющая Rn силы R численно равна N, а горизонтальная составляющая F представляет собой силу трения качения. Пара сил Rn и N, приложенных к катящемуся телу, создает момент трения M, равный
M = F ∙ r = k ∙ N,
r – радиус катящегося тела,
k – коэффициент трения качения, имеющий размерность длины и зависящий от материала тел, состояния их поверхностей и целого ряда других факторов.
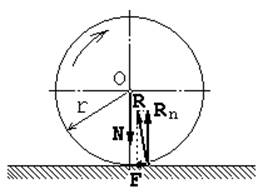
Рис. 3
Исходя из вышеизложенных соображений, момент сопротивления будем рассчитывать по следующей формуле:
kр – коэфф., учитывающий трение реборд колес о рельсы, возникающее вследствие возможного перекоса конструкции; обычно kр=2…2,5 поэтому принимаю kр=2,25;
mсупп – общая масса механизма перемещения суппорта, включающая в себя массу суппорта с резаком m, массу двигателя и массу редуктора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.