Тm - некомпенсированная постоянная времени в этом контуре, необходима для помехозащищенности контура (источником помех является коллекторная зона – на сигнал с шунта накладываются высокочастотные пульсации).
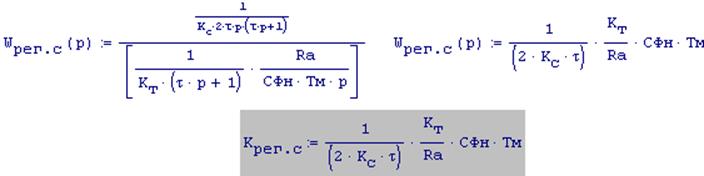
Желаемая передаточная функция замкнутого контура тока:

Желаемая передаточная функция разомкнутого контура тока:

При таком высоком быстродействии можно пренебречь влиянием внутренней ООС по ЭДС, так как скорость меняется значительно медленнее, чем ток (едв зависит от ), потому что Тм достаточно велика. Тогда исходная передаточная функция разомкнутого контура тока:

Передаточная функция регулятора тока находится следующим образом:
Следовательно
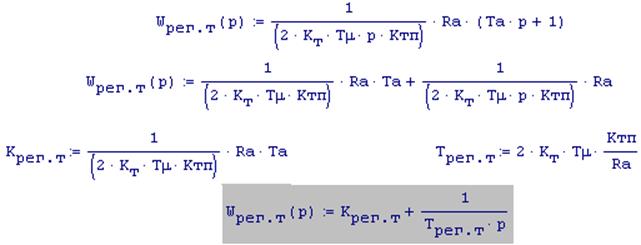
Þ получили ПИ-регулятор тока.
Структурная схема контура скорости имеет вид:
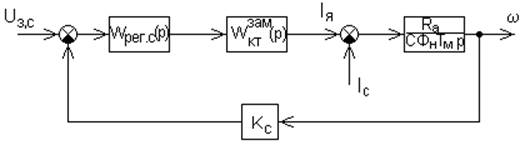
Рис. 11
Контур скорости настраиваем на модульный оптимум, так как режим работы электропривода повторно - кратковременный и наиболее важны пуско-тормозные режимы работы (необходимо малое перерегулирование).
Усекаем контур тока до
В качестве новой некомпенсируемой постоянной времени примем
![]()
Тогда
Желаемая передаточная функция замкнутого контура скорости:

Желаемая передаточная функция разомкнутого контура скорости:

Исходная передаточная функция разомкнутого контура скорости:

Передаточная функция регулятора скорости находится следующим образом:
Следовательно
Þ получили П-регулятор скорости. При настройке на МО система регулирования скорости получилась со статической ошибкой регулирования.
Статическая ошибка зависит от Крс: чем больше Крс, тем меньше ошибка. Наличие статической ошибки не оказывает существенного влияния на работу данного электропривода.
Структурная схема системы регулирования показана на рис. 12.
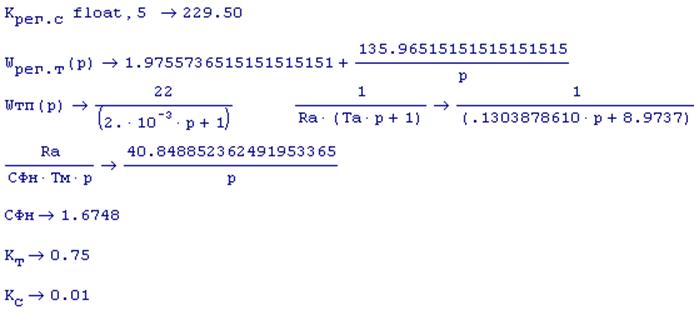
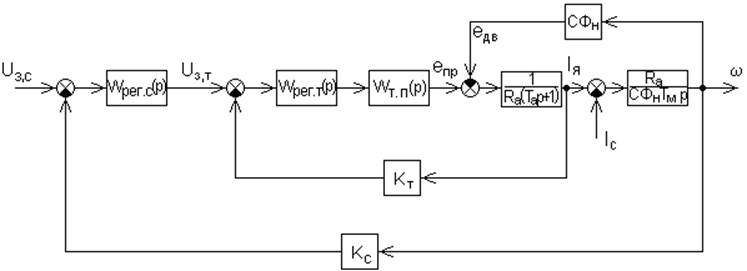
Рис. 12
7.Построение переходных процессов одного цикла работы электропривода
Переходные процессы будем рассчитывать в предположении, что на вход системы подается сигнал, соответствующий рассчитанной ранее тахограмме, а также с учетом величины и моментов приложения и снятия нагрузки.
Методом расчета является численное моделирование на основе метода переменных состояния с помощью пакета MATLAB. При этом будут учтены основные нелинейности, входящие в состав системы управления и заданной части электропривода (ограничения выходов регуляторов и силового преобразователя).
Модель САР, используемая при моделировании, представлена на рис. 13.
 Рис. 13. Модель САР
Рис. 13. Модель САР
График изменения скорости wдв,пр(t) при подаче на вход системы сигнала задания, соответствующего тахограмме, приведен на рис. 14.
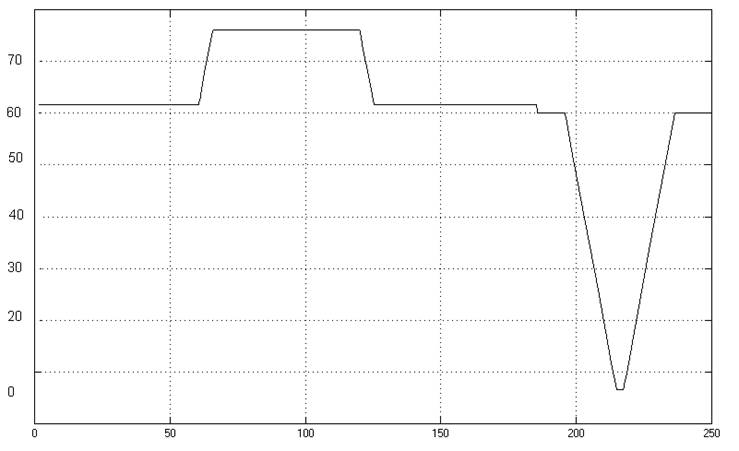
Рис. 14
Для выяснения характера динамических процессов, которые не видны на рис. 14, далее изобразим некоторые участки графика wдв,пр(t) увеличено .
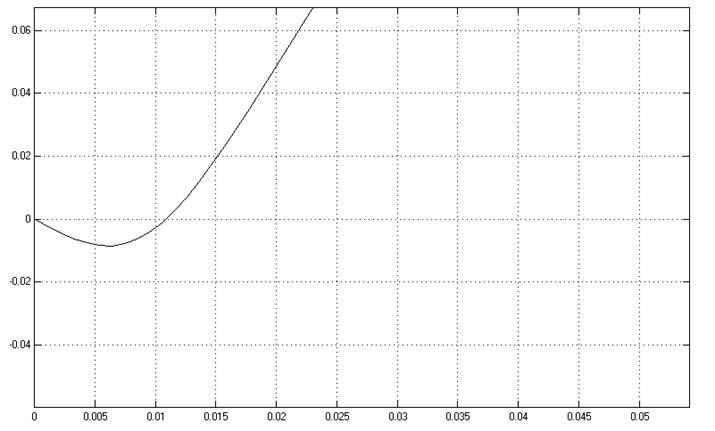
Рис. 15
Рис. 16
 Рис. 17
Рис. 17
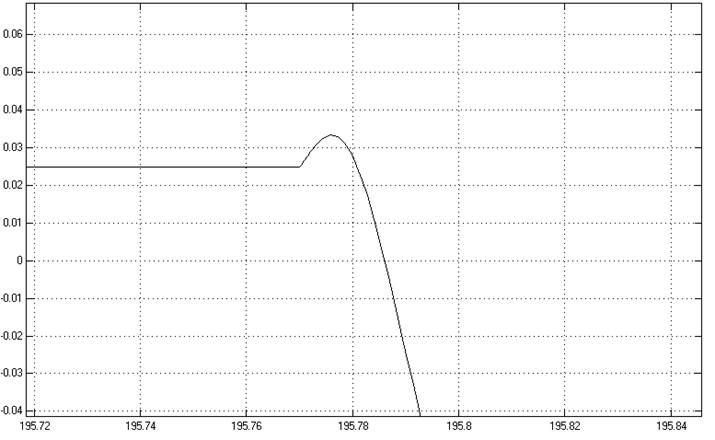
Рис. 18
Рис. 19
График изменения момента Mдв(t) при подаче на вход системы сигнала задания, соответствующего тахограмме, приведен на рис. 20.
Рис. 20
Для выяснения характера динамических процессов, которые не видны на рис. 20, далее изобразим некоторые участки графика Mдв(t) увеличено.
 Рис. 21
Рис. 21
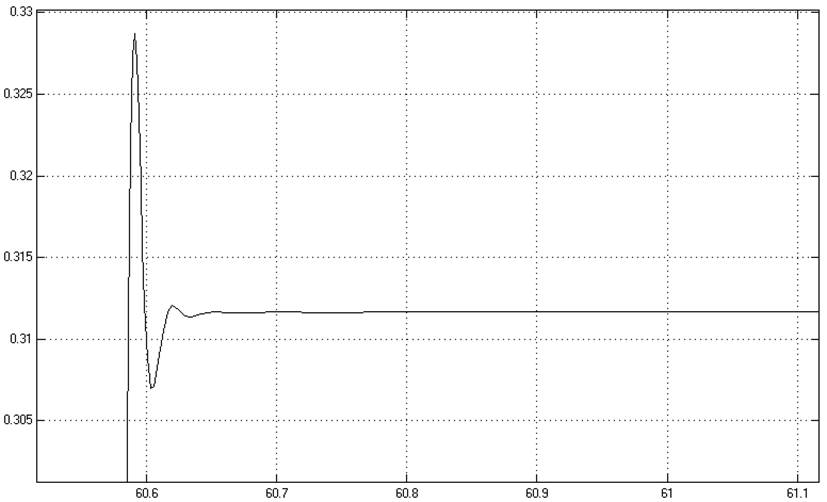 Рис. 22
Рис. 22
Динамическая механическая характеристика при подаче на вход системы сигнала задания, соответствующего тахограмме, приведена на рис. 23.
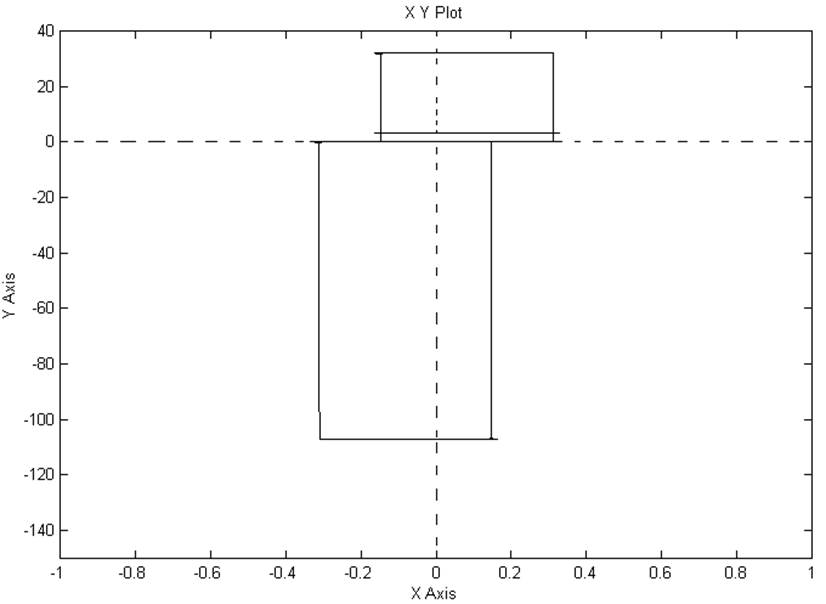 Рис. 23
Рис. 23
Для пояснения характера динамических процессов, которые не видны на рис. 23, далее изобразим участок графика ДМХ, соответствующий разгону до скорости врезания и движения с этой скоростью (увеличено).
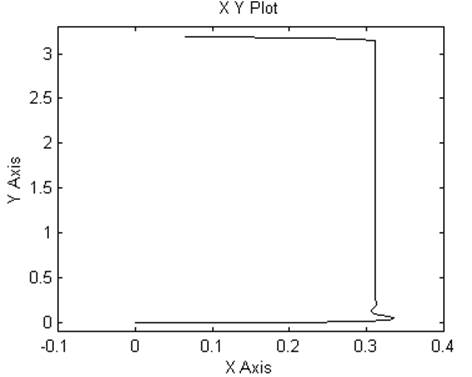
Рис. 24
Уточненная проверка работоспособности электропривода по условиям перегрузки и нагревания двигателя
Уточненную проверку работоспособности электропривода будем производить на основе графика изменения момента двигателя, полученного в предыдущем разделе посредством моделирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.