Т – период.(время, через которое
значение функции повторяется )
¦=1/T -циклическая частота (число периодов в
секунду)
w = 2p*¦ - круговая (угловая) частота. Угловая
частота показывает сколько периодов в радианной мере
укладывается в единицу измерения.
е. Обобщенный гармонический сигнал
Также синусоидальный сигнал, представленный в комплексной форме.
k=a+jb – алгебраическая форма записи комплексного числа, где
а- действительная составляющая
jb- мнимая составляющая
![]()
к=M(cos φ+jsin φ)-тригонометрическая форма записи комплексного числа
k=M*ejφ- показательная форма записи комплексного числа
![]() -длина вектора
-длина вектора
φ=arctg b/a
φ=ωt; ω=2π/T; b=M*cos φ=M*cos ωt
Формула Эйлера:
ejφ= cos φ+jsin φ
X1-синусоидальный,X2-синусоидальный, но с другой амплитудой.
X1=X1mcos ωt
X2=X2mcos (ωt+ φ)
Представим входной сигнал в виде суммы двух комплексных чисел.
![]()
![]()

Представим аналогично другой сигнал:
Сумма сигналов равна сумме отклонений сигналов.
Представление входных и выходных сигналов в виде суммы двух входных сигналов и откликов позволяет полагать, что если на входе действует комплексный сигнал ejωt, то на выходе будет сигнал ej(ωt+ φ)
![]()
2.3 Преобразование Лапласа и его свойства.
В этом разделе даны основные сведения о преобразовании Лапласа, которые будут использованы при рассмотрении систем, описываемых линейными дифференциальными уравнениями.
 Пусть дана
непрерывная функция f(t)
Пусть дана
непрерывная функция f(t)
Имеет ограничения:
1. t<0=0
|
с-константа абсолютной сходимости.
Все типовые сигналы ему удовлетворяют.
Назовем функцию F(p) изображением по Лапласу от функции f(t), если
F(p)= (1)
(1)
Для краткости следующую формулу записываем в виде:
F(p)=L{f(t)} (2)
Для типовых сигналов f(t) изображения вычислены и сосредоточены в таблице в приложениях по ТАУ.
p-оператор преобразования сигнала
j-комплексное число
p=α+jω-который можно интерпретировать как информационный ноль пробного сигнала:
X(t)=e- α t( cos ωt+ jsin ωt)
α-показатель затухания экспоненты
ω-частота
Соотношения (1), (2) называют преобразованием Лапласа, ставящее Функции f(p) вещественного переменного в соответствие функцию F(p) комплексного переменного p (p= α+jω). При этом f(p) называют оригиналом, а F(p) называют изображением или изображением по Лапласу.
То, что f(p) имеет своим изображением F(p) или оригиналом F(p) является f(p), записывается так:
f(t)![]() F(p),
F(p),
которое мы будем называть изображение по Лапласу.
Иногда также пользуются символической записью
F(p)=L[f(t)]
Преобразование Лапласа является обратимым, т.е. по изображение может быть найден оригинал:
f(t)=L-1[F(p)]=
р
– оператор преобразования Лапласа р=![]() +jw,
имеющий смысл комплексного независимого параметра
+jw,
имеющий смысл комплексного независимого параметра
![]() - показатель затухания пробного
экспоненциального сигнала
- показатель затухания пробного
экспоненциального сигнала
w – круговая частота обобщенного гармонического сигнала
Пример: пусть f(t) имеет следующий вид: f(t)=1(t). Найдем изображение этого сигнала по Лапласу.
L[1(t)]=
Обратные преобразования Лапласа.
|
ОРИГИНАЛ |
ИЗОБРАЖЕНИЕ |
|
1(t) |
|
|
d(t) |
1 |
|
t |
|
|
tn |
|
|
e-at |
|
|
|
|
|
1- e-at |
|
|
1- |
|
|
sin wt |
|
|
cos wt |
|
|
e-at * sin wt |
|
|
e-at * cos wt |
|
Свойства преобразования Лапласа
· линейность
f1(t) ![]() F1(p)
F1(p)
f2(t) ![]() F2(p)
F2(p)
тогда L(f1(t)+ f2(t))= F1(p)+ F2(p)
· теорема о дифференцировании оригинала
Пусть известна функция f(t),
ее производная ![]() (t)=df(t)/dt и
ее изображение f(t)
(t)=df(t)/dt и
ее изображение f(t)![]() F(p).
Если начальные условия нулевые, т.е. f(0)=0, то дифференцируемый
аргумент в области изображений сводится к умножению на p, поэтому на
техническом уровне p называют символом дифференцирования при переходе к
изображению. Тогда изображение производной может быть найдено по формуле L(
F(p).
Если начальные условия нулевые, т.е. f(0)=0, то дифференцируемый
аргумент в области изображений сводится к умножению на p, поэтому на
техническом уровне p называют символом дифференцирования при переходе к
изображению. Тогда изображение производной может быть найдено по формуле L(![]() (t)]=pF(p); f(t)|t=0.
(t)]=pF(p); f(t)|t=0.
· интегрирование оригинала
Интегрирование оригинала сводится к делению изображения на p

![]()
· изменение масштаба по времени
![]()
![]()
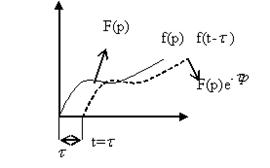
· смещение аргумента у оригинала
f(t) ![]() F(p)
F(p)
![]()
![]() Ф(р)-F(p)
Ф(р)-F(p)![]()
· теорема о конечном значении функции
f(t) ![]() F(p)
F(p)
![]()
· теорема о начальном значении
f(t) ![]() F(p)
F(p)
![]()
2.3. Понятие передаточной функции
Передаточной функцией называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях. Если звено (система) имеет несколько входов, то при определении передаточной функции относительно какой-либо одной входной величины остальные величины полагают равными нулю.
 Пусть
нам нужно связать выходной сигнал с входным у некоторого элемента
Пусть
нам нужно связать выходной сигнал с входным у некоторого элемента
Если можно ввести , что
![]() , то мы
, то мы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.