 |
![]()
 (*)
(*)
Рассмотрим пример математического очищения элементов САУ.
Допустим, мы имеем дело с механическим редуктором
Редуктора имеет разное число зубьев ![]() и
и
![]()
 и вращаются с
разной скоростью ω1 и ω2
и вращаются с
разной скоростью ω1 и ω2
![]()
![]() ω1(t)
ω1(t) ![]() ω2(t).
ω2(t).
![]()
![]() связана
с
связана
с ![]() . В зоне контакта линейные скорости
. В зоне контакта линейные скорости
равны:![]()
![]()
![]()
![]()
|
Это уравнение можно
преобразовать к
уравнению (*), если ![]() ,
, ![]() ,
, ![]() и
т.д. равны 0, то мы получим
и
т.д. равны 0, то мы получим  .
.
Рассмотрим следующую электрическую цепь
|
|

![]()
![]()
![]()
|
Эти 2 уравнения, описывающие процессы в цепи могут быть положены в основу
уравнения (*). Сделаем преобразования
![]()
чтобы придать уравнению вид (*) нужно избавиться от интеграла, т.е. продифференцировать
|
a1=Rc
a0=1 
0=1
Это уравнение описывает инерционное звено первого порядка
(апериодическое)
Предположим, входной сигнал скачкообразный
![]()
![]()
![]()
![]() g U(t)
g U(t)
Если мы подадим на вход единичный ступенчатый сигнал, то выходной сигнал будет вычисляться как ступенчатый. Мы как бы вбросим заряд, что приведет к напряжению на конденсаторе за очень маленький промежуток времени, поэтому процесс зарядки происходит мгновенно.
 U(t)
U(t)
Входной сигнал
t
 x, y Y
x, y Y
|
сигнал
|
t
|
Пусть реакция на сигнал X1(t) выглядит, как Y1(t), а сигналу X2 соответствует
сигнал Y2
![]() X=X1(t) Y=Y1(t)
X=X1(t) Y=Y1(t)
X=X2(t) Y=Y2(t)
Тоже для суммарного сигнала
X=X1(t)+X2(t) может быть найдена, как Y=Y1(t)+Y2(t)
Докажем, что звено (редуктор) является линейным:
X1=2 Y1=4
X2=3 Y2=6
X3=X1+X2 =5 Y3=Y1+Y2 =10
Можно показать, что звенья, описываемые уравнением (*) обладают свойством линейности, если коэффициент a1,…,an=const и b1,….,bn =const
2.2 Типовые сигналы систем автоматического управления.
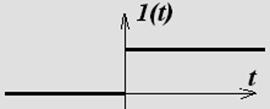
а. Единичный ступенчатый сигнал
Назовем единичным ступенчатым сигналом сигнал вида:
X(t)=1(t)=
Физически это сигнал замыкающего контакта (релейный сигнал)
Это функция называется функцией Хевисайда.
б. Импульсная дельта функция (функция Дирака)
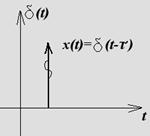
![]() называется предел последовательности
прямоугольных импульсов, которые строятся по следующему правилу:
называется предел последовательности
прямоугольных импульсов, которые строятся по следующему правилу:
Дадим другое определение d - функции, как пределу последовательности приближений.
 Первое приближение.
Первое приближение.
δ
1=
 Второе
приближение.
Второе
приближение.
δ
2=
 Приближение п - порядка
Приближение п - порядка
δ
n=
Площадь графиков каждого приближения постоянна и равна 1.
Свойства линейности
Линейными называются звенья, обладающие следующими свойствами:
Итак, пусть ![]() выглядит
выглядит
![]() , а сигналу
, а сигналу ![]() соответствует
соответствует
![]() , тогда
, тогда ![]() может
быть найдена
может
быть найдена ![]() .
.
 Докажем,
что это звено линейное
Докажем,
что это звено линейное
Звено передает сигнал с коэффициентом 2.
![]()
![]()
![]()
![]()
![]() =5
=5 ![]() =10
=10
Все
уравнения (*) будут линейными, если ![]() и т.д. будут
постоянными.
и т.д. будут
постоянными.
Д,З: покажите, пользуясь линейностью дифференцирования, справедливость этого утверждения.
в. Линейно изменяющийся сигнал
 |
X(t=)
 г. Параболический сигнал
г. Параболический сигнал
![]() x(t)=
x(t)= 
д. Гармонический(синусоидальный сигнал) сигнал
 |
Описывает соотношение:
X(t)=asin(wt+j)
a-амплитуда
j- начальная фаза (если начало синусоиды
находится слева от оси X , то ![]() будет со
будет со
знаком “+”, если справа – со знаком “-“)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.