В наиболее сложных системах управления используются все три типа управления непрерывным процессом — пропорциональное, интегральное и дифференциальное. Этот комбинированный тип управления описывается уравнением

Специалисты по управлению обычно
используют уравнение (13.4), в котором учтено требование, заключающееся в том,
чтобы коэффициент усиления системы G удовлетворял всем трем типам управления—пропорциональному,
интегральному и дифференциальному. Регулируемый параметр для интегрального
управления представляет собой интегральный период ![]() связанный с коэффициентом усиления
следующей зависимостью:
связанный с коэффициентом усиления
следующей зависимостью:
![]()
Регулируемый
параметр для дифференциального управления представляет собой дифференциальный
период ![]() , связанный с коэффициентом усиления
следующей зависимостью:
, связанный с коэффициентом усиления
следующей зависимостью:
![]()
Выражение для полного управляющего сигнала на выходе устройства управления для управления переменным параметром имеет вид

где ![]() —
уставка;
—
уставка; ![]() — выходной сигнал управления
переменным параметром.
— выходной сигнал управления
переменным параметром.
Специалисты по управлению определяют ошибку как разность уставки и текущего значения регулируемого параметра, а не наоборот, как определили мы в данном разделе.
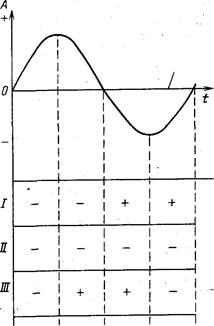
Рис. 13.9
Таблица положительных и отрицательных воздействий, компенсирующих погрешность воспроизведения параметра процесса A (t) при трех основных режимах управления (А = 0 — уставка процесса):
I - пропорциональном; II — интегральном;
III — дифференциальном
Уравнение (13.5) в большей степени совместимо с техническими средствами реальной системы управления, однако уравнение (13.4) лучше объясняет общую концепцию управления, предусматривающую использование трех типов управления: пропорционального, интегрального и дифференциального. Рис. 13.9 может рассматриваться как иллюстрация к уравнению (13.4); на рисунке в табличном виде приведена чувствительность (положительная или отрицательная) каждого типа управления для различных позиций регулирования переменного регулируемого параметра на изменение уставки.
Оптимизация управления. Выбор идеального сочетания (Кр, Ki и Kd) типов управления для заданной системы представляет собой предмет оптимизации системы управления. Оптимизация требует проведения подробного исследования. Сложные исследования характеристик системы целесообразно производить с использованием преобразования Лапласа. Этот аппарат для проведения аналитических исследований существовал задолго до появления роботов и современных средств автоматизации производства. Инженеры-электрики давно использовали аппарат теории управления при расчете электрических устройств и систем. Теорией управления также пользовались инженеры-механики при разработке механизмов управления параметрами механических систем.
Появление ЭВМ для числового управления технологическими процессами привело к цифровому представлению непрерывных технологических параметров для анализа и управления. Цифровое квантование, используемое при оптимизации аналоговых систем управления, представляет собой новый тип измерения и реализуется с помощью дискретной техники. По сравнению с преобразованием Лапласа для исследования дискретных систем более подходящим является аппарат Z-преобразования. Подробное изложение принципов оптимизации систем управления с помощью преобразования Лапласа или Z-преобразования выходит за рамки настоящей книги. Для успешного внедрения роботов и средств автоматизации производства нет необходимости в понимании принципов оптимизации систем управления. Для специалиста по автоматизации необходимо знать основные принципы различных типов управления и то, что реализация этих принципов возможна с помощью ЭВМ в реальном времени. Теперь остановимся на характеристиках ЭВМ, функционирующих в реальном времени, что позволяет использовать последние для управления роботами и в качестве средств автоматизации.
13.3. ИНТЕРФЕЙС ПРОИЗВОДСТВЕННОГО ОБОРУДОВАНИЯ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.